GEOMETRY OF RIEMANN SURFACES AND TEICHMULLER SPACES
NORTH-HOLLAND MATHEMATICS STUDIES 169 (Continuation of the Notas ...
65 downloads
1317 Views
10MB Size
Report
This content was uploaded by our users and we assume good faith they have the permission to share this book. If you own the copyright to this book and it is wrongfully on our website, we offer a simple DMCA procedure to remove your content from our site. Start by pressing the button below!
Report copyright / DMCA form
GEOMETRY OF RIEMANN SURFACES AND TEICHMULLER SPACES
NORTH-HOLLAND MATHEMATICS STUDIES 169 (Continuation of the Notas de Matematica)
Editor: Leopoldo NACHBIN Centro Brasileiro de Pesquisas Fisicas Rio de Janeiro, Brazil and University of Rochester New York, U.S.A.
NORTH-HOLLAND -AMSTERDAM
LONDON
NEW YORK
TOKYO
GEOMETRY OF RIEMANN SURFACES AND TEICHMULLER SPACES
Mika SEPPALA Academy of Finland Helsinki, Fin land
Tuomas SORVALI University of Joensuu Joensuu, Finland
1992
NORTH-HOLLAND -AMSTERDAM
LONDON
NEW YORK
TOKYO
ELSEVIER SCIENCE PUBLISHERS B.V. Sara Burgerhartstraat 25 P.O. Box 211,1000 AE Amsterdam, The Netherlands Distributors for the United States and Canada: ELSEVIER SCIENCE PUBLISHING COMPANY, INC. 655 Avenue of the Americas New York, N.Y. 10010, U.S.A.
Library of Congress Cataloging-in-Publication
Data
Seppala. Mika. G e o m e t r y o f R i e m a n n s u r f a c e s and T e i c h m u l l e r s p a c e s / M i k a Seppala, Tuomas Sorvali. p. c m . -- ( N o r t h - H o l l a n d Mathernalics s t u d i e s , 169) I n c l u o e s b i b l i o g r a p h i c a l r e f e r e n c e s a n d index. I S B N 0-444-88846-2 1. R i e m a n n surfaces. 2. T e i c h n u l l e r s p a c e s . I. S o r v a l i . T u o n a s . 1944. 11. T i t l e . 1 1 1 . S e r i e s . O A 3 3 3 . S42 1992 515 .223--dc20 9 1-34760 CIP
ISBN: 0 444 88846 2
0 1992 ELSEVIER SCIENCE PUBLISHERS B.V. All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior written permission of the publisher, Elsevier Science Publishers B.V., Permissions Department, P.O. Box 521, 1000 AM Amsterdam, The Netherlands. Special regulations for readers in the U.S.A. - This publication has been registered with the Copyright Clearance Center Inc. (CCC), Salem, Massachusetts. Information can be obtained from the CCC about conditions under which photocopies of parts of this publication may be made in the U.S.A. All other copyright questions, including photocopying outside of the U.S.A., should be referred to the publisher. No responsibility is assumed by the publisher for any injury and/or damage to persons or property as a matter of products liability, negligence or otherwise, or from any use or operation of any methods, products, instructions or ideas contained in the material herein. Printed in The Netherlands
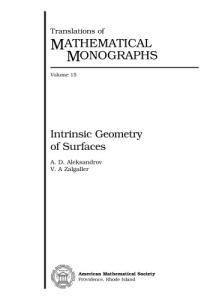
Preface This monograph grew out of a series of lectures held by the first author at the University of Regensburg in 1986 and in 1987 and by the second author at the University of Joensuu in 1990. This book would presumably not have been written without the initiative of Professor Leopoldo Nachbin. A large part of the present work has been carried out at the University of Regensburg and at the Mittag-Leffler Institute. We thank these both institutes for their warm hospitality. Finally we thank Ari Lehtonen for several figures, especially for his intriguing illustration of the Klein bottle.
In Helsinki and in Joensuu, Finland August 1991 Mika Seppala
Tuoinas Sorvali
1
This Page Intentionally Left Blank
Introduction The moduli problem is to describe the structure of the space of isomorphism classes of Riemann surfaces of a given topological type. This space is known as the moduli space. It has been in the center of pure mathematics for more than 100 years now. In spite of its age, this field still attracts lots of attention. The reason lies in the fact that smooth compact Riemann surfaces are simply complex projective algebraic curves. Therefore the moduli space of compact Riemann surfaces is also the moduli space of complex algebraic curves. This space lies in the intersection of many fields of mathematics and can, therefore, be studied from many different points of view. Our aim is to get information about the structure of the moduli space using as concrete and as elementary methods as possible. This monograph has been written in the classical spirit of Fricke and Klein ([31]) and in that of Lehner ([57]). Our main goal is to see how far the concrete computations based on uniformization take us. It turns out that this simple approach leads to a rich theory and opens a new way of treating the moduli problem. Or rather puts new life in the classical methods that were used in the study of moduli problems already in the 1920’s. Some results, like the Uniformization of Riemann surfaces, have to be presented here without proofs. They are, however, used almost exclusively to interpret the results derived by other means. Proofs are not really based on them. In all cases, where we do not present proofs, we furnish exact references. If one is willing to accept Uniformization and some related facts, then this monograph is self-contained and can be read without much prior knowledge about complex analysis. In Chapter 1 we develop an engine that will power other chapters. There we consider Mobius transformations and matrices. One of our aims in Chapter 1 is to understand thoroughly how commutators of Mobius transformations behave and how groups generated by Mobius transformations can be parametrized. All considerations here are elementary, but sometimes technically complicated. In Chapter 2 we present some basic results of the theory of quasiconfor3
4
INTRODUCTION
ma1 mappings. Everything there is presented without proofs, which can be found in the monograph of Lars V. Ahlfors [6] and in that of Olli Lehto and Kalle Virtanen [59]. Quasiconformal mappings have played an important role in the theory of Teichmiiller spaces. They provided the tools with which it was possible to develop the first rigorous treatment of the moduli problem. Today most of the results concerning Teichmiiller spaces and moduli spaces can be shown even without quasiconformal mappings. Quasiconforma1 mappings are only absolutely necessary to show that the moduli space of symmetric Riemann surfaces of a given topological type is connected (cf. Theorem 4.4.1 on page 147). In Chapter 3 we first review the Uniformization of Riemann surfaces without proofs. Then we show how considerations of Chapter 1 can be applied to study the geometry of Riemann surfaces. Our main concern in this Chapter is to study the geometry of hyperbolic metrics of Riemann surfaces of negative Euler characteristics. We derive many results concerning simple closed geodesics and sizes of collars around them. We pay special attention to the geometry of symmetric Riemann surfaces, i.e., to non-classical Klein surfaces. Everything here can be shown in detail using the results of Chapter 1. It is actually surprising how much information can be obtained from detailed analysis of the commutator of Mobius transformations. Considerations of Chapter 3 form a quite comprehensive treatment of certain aspects of the geometry of hyperbolic surfaces. So it may be of some interest for its own sake already. Main target is, however, to get information about the moduli problem using considerations of Chapter 1 alone. The beginning of Chapter 3 provides an environment in which considerations of Chapter 1 can be interpreted so that we get useful results for later applications. In Chapter 4 we introduce Teichmuller spaces and define its topology using quasiconformal mappings. Here we have to resort to the review presented without proofs in Chapter 2. We will, however, later derive an alternative way of parametrizing the Teichmuller space using the geodesic length functions. That is done in detail here (see page 161). Quasiconformal mappings provide a simple way to describe the complex structure of the Teichmuller space of classical Riemann surfaces (cf. page 148). We will take benefit of that description and indicate how our considerations lead to a real analytic theory of Teichmuller spaces. This also leads to a presentation of Teichmiiller spaces as a component of an affine real algebraic variety (Section 4.12). This affine structure is derived here in detail. This is a n important part in the theory of Teichmiiller spaces, albeit not central, because it opens new ways of compactifying the Teichmiiller space by using methods of real algebraic geometry (cf. 1641, [16], [73]). We will not consider these interesting approaches to the compactification problem here.
INTRODUCTION
5
Figure 0.1: T h e Mobius strip and the Klein bottle are two genus 1 real algebraic curves that are not homeomorphic to each other. In this monograph a new moduli space is constructed for the these non-classical Klein surfaces. T h e presentation of the affine structure of Teichmuller spaces is, however, partly motivated by these new applications of real algebraic geometry. Points of the moduli space of compact genus g Riemann surfaces are isomorphism classes of mutually homeomorphic genus g Riemann surfaces. Such Riemann surfaces are smooth projective complex algebraic curves. So the moduli space of genus g Riemann surfaces is the same thing as the moduli space of smooth genus g complex algebraic curves. In Chapter 5 we consider this moduli space and define a natural topology for it. The definition of the topology is based on the Fenchel-Nielsen coordinates. In that topology the moduli space is connected but not compact. Using the considerations of Chapter 3 we then consider degenerating sequences of Riemann surfaces. It turns out that by adding points corresponding t o so called stable Riemann surfaces it is possible t o compactify the moduli space of compact and smooth genus g Riemann surfaces. This is quite classical today and has first been shown by David Mumford and others using the methods of complex algebraic geometry. Smooth projective real algebraic curves have more structure than complex curves. They can be viewed as compact Riemann surfaces with symmetry. Equally well they can be viewed as compact non-classical Klein surfaces, i.e., surfaces that are obtained as the quotient of a smooth Riemann surface by the action of the symmetry. This fact was realized already by Felix Klein (cf. [46]). Therefore the inoduli spaces of non-classical compact Riemann surfaces are simply moduli spaces of real algebraic curves. A compact genus g surfaces has L(3g +4)/2J topologically different orientation reversing symmetries. It follows, especially, that real algebraic curves of the same genus need not be homeomorphic t o each other. This implies that, in any reasonable topology, the moduli space of smooth genus g real
6
INTRODUCTION
algebraic curves has several connected components. The situation changes completely when we consider the natural compactification of the moduli space of real algebraic curves. That space is obtained by adding points corresponding to stable genus g real algebraic curves. We show, in Chapter 5 , that this moduli space of stable real algebraic curves of a given genus g , g > 1, is a connected and compact Hausdorff space. This fact was already conjectured by Felix Klein in [48, Page 81. We start Chapter 1 with the assumption that the reader is familiar with elementary properties of Mobius transformations. For the sake of completeness we have included also an appendix in which we develop the elementary and classical theory of Mobius transformations. A proof for the so called Nielsen Criterium for discreteness of Mobius groups acting in a disk is also included. Basic properties of the hyperbolic geometry are considered in an appendix as well. Resorting to the appendices, if necessary, this monograph can be read with only basic knowledge of complex analysis.
Contents 1 Geometry of Mobius transformations 1.1 Introduction t o Chapter 1 . . . . . . . . . . . . . . . . . . 1.2 Mobius transformations . . . . . . . . . . . . . . . . . . . . . 1.3 Multiplier preserving isomorphisms . . . . . . . . . . . . . . 1.4 Parametrization problem and classes H . P and & . . . . . . 1.5 Geometrical properties of the classes P and 'H . . . . . . . . 1.6 Parametrization of principal-circle groups by multipliers . . 1.7 Orthogonal decompositions and twist parameters . . . . . . 2
3
Quasiconformal mappings 2.1 Introduction t o Chapter 2 . . . . . . . . . . . . . . . . . 2.2 Conformal invariants . . . . . . . . . . . . . . . . . . . . . . . 2.3 Definitions for quasiconformal mappings . . . . . . . . . . 2.4 Complex dilatation . . . . . . . . . . . . . . . . . . . . . . . .
. . . . .
.
11 11 12 17 23 29
40 46 59
.. ..
59 59 61 62
Geometry of Riemann surfaces 69 3.1 Introduction to Chapter 3 . . . . . . . . . . . . . . . . . . . 69 3.2 Riemann and Klein surfaces . . . . . . . . . . . . . . . . . . . 69 3.3 Elementary surfaces . . . . . . . . . . . . . . . . . . . . . . . 71 3.4 Topological classification of surfaces . . . . . . . . . . . . . . 72 3.5 Discrete groups of Mobius transformations . . . . . . . . . . . 80 3.6 Uniforinization . . . . . . . . . . . . . . . . . . . . . . . . . . 85 3.7 Models for symmetric surfaces . . . . . . . . . . . . . . . . . . 93 3.8 Hyperbolic metric of Rieinann surfaces . . . . . . . . . . . . . 95 3.9 Hurwitz Theorem . . . . . . . . . . . . . . . . . . . . . . . . . 97 3.10 Horocycles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101 3.11 Nielsen's criterium for discontinuity . . . . . . . . . . . . . . . 104 3.12 Classification of Fuchsian groups . . . . . . . . . . . . . . . .107 3.13 Short closed curves . . . . . . . . . . . . . . . . . . . . . . . . 108 3.14 Collars . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109 3.15 Length spectrum . . . . . . . . . . . . . . . . . . . . . . . . . 115
7
CONTENTS
8
3.16 Pants decompositions of compact surfaces . . . . . . . . . . . 117 3.17 Shortest curves on a hyperbolic Riemann surface with a symmetry . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120 3.18 Selection of additional simple closed curves on a hyperbolic Riemann surface with a symmetry . . . . . . . . . . . . . . . 124 3.19 Numerical estimate . . . . . . . . . . . . . . . . . . . . . . . . 129 3.20 Groups of Mobius transformations and matrix groups . . . . 131 3.21 Traces of commutators . . . . . . . . . . . . . . . . . . . . . . 132 3.22 Liftings of Fuchsian groups . . . . . . . . . . . . . . . . . . . 135 4 Moduli problems and Teichrnuller spaces
4.1 4.2 4.3 4.4 4.5 4.6 4.7 4.8 4.9 4.10 4.11 4.12 4.13 4.14
137 Introduction to Chapter 4 . . . . . . . . . . . . . . . . . . . . 137 Quasiconformal mappings of Riemann surfaces . . . . . . . . 141 Teichiniiller spaces of Klein surfaces . . . . . . . . . . . . . . 144 Teichiniiller spaces of Beltrami differentials . . . . . . . . . . 147 Non-classical Klein surfaces . . . . . . . . . . . . . . . . . . . 148 Teichinuller spaces of genus 1 surfaces . . . . . . . . . . . . . 150 Teichinuller spaces of reflection groups . . . . . . . . . . . . . 152 Parametrization of Teichinuller spaces . . . . . . . . . . . . . 155 Geodesic length functions . . . . . . . . . . . . . . . . . . . . 158 Discontinuity of the action of the modular group . . . . . . . 162 164 Representations of groups . . . . . . . . . . . . . . . . . . . . 170 The algebraic structure . . . . . . . . . . . . . . . . . . . . . 172 Reduction of parameters . . . . . . . . . . . . . . . . . . . . . Extension to non-classical surfaces . . . . . . . . . . . . . . . 174
5 Moduli spaces 177 5.1 Introduction to Chapter 5 . . . . . . . . . . . . . . . . . . . 177 5.2 Moduli spaces of smooth Riemann surfaces . . . . . . . . . . 178 5.3 Moduli spaces of genus 1 surfaces . . . . . . . . . . . . . . . . 180 5.4 Stable Rieinann surfaces . . . . . . . . . . . . . . . . . . . . . 185 5.5 Fenchel-Nielseii coordinates . . . . . . . . . . . . . . . . . . . 190 5.6 Topology for the inoduli space of stable Riemann surfaces . 192 194 5.7 Compactness theorem . . . . . . . . . . . . . . . . . . . . . . 5.8 Syinmetric Rieinann surfaces and real algebraic curves . . . . 195 5.9 Connectedness of the real moduli space . . . . . . . . . . . . 197 5.10 Compactness of the real moduli space . . . . . . . . . . . . . 201 5.11 Review on results concerning the analytic structure of moduli spaces of compact Rieinann surfaces . . . . . . . . . . . . . . 204
.
CONTENTS
9
A Hyperbolic metric and MSbius groups 209 A.l Length and area elements . . . . . . . . . . . . . . . . . . . . 209 A.2 Isometries of the hyperbolic metric . . . . . . . . . . . . . . . 211 A.3 Geometry of the hyperbolic metric . . . . . . . . . . . . . . . 211 A.4 Matrixgroups . . . . . . . . . . . . . . . . . . . . . . . . . . . 213 218 A.5 Representation of groups . . . . . . . . . . . . . . . . . . . . . A.6 Complex Mobius transformations . . . . . . . . . . . . . . . . 223 A.7 Abelian groups of Mobius transformations . . . . . . . . . . . 231 A.8 Discrete groups of Mobius transformations . . . . . . . . . . . 238
B Traces of matrices B.l Trace functions
..........................
245 245
Bibliography
249
Subject Index
258
This Page Intentionally Left Blank
Chapter 1
Geometry of Mobius transformations 1.1
Introduction to Chapter 1
Our main interest lies in parametrizing groups generated.by Mobius transformations. By the Uniformization such a parametrization can be used t o study surfaces and their complex structures. That is the theme of chapters 3 , 4 and 5. In this chapter we derive the necessary preliminary results which then power the rest of the book (excluding Chapter 2). First we recall briefly the classification of Mobius-transformations. That is explained in more detail in Appendix B in which we review the classical theory of Mobius transformations and groups of Mobius transformations. Natural question is t o find ways of parametrizing Mobius groups up to a conjugation by a Mobius transformation. Therefore we need parameters which remain invariant under such conjugations. Natural candidates for such parameters are the multipliers of Mobius transformations. Equivalently one may use also traces of the corresponding matrices. In this chapter we will mainly use multipliers. They are more natural since they are uniquely determined while the trace of the corresponding matrix is determined only up to the sign by the Mobius transformation. This difference may a t first sight appear only as a small technical complication, but it turns out to be one of the main difficulties. The problem lies in the fact that the sign the trace of a product of t w o matrices is not determined by the signs of traces of the matrices in question. To deal with that difficulty we introduce, in Section 1.4, a classification of pairs of hyperbolic Mobius transformations. We use that classification to find natural parameters which determine a group (generated by a finite number of hyperbolic Mobius transformations) up to a conjugation by a MGbius transformation. 11
CHAPTER 1. MOBIUS TRANSFORMATIONS
12
The main problem of this section is to find a minimal set of parameters for Mobius groups generated by a finite number of hyperbolic Mobius transformations. That is also important for later applications. In the general case these groups are not freely generated. The generators usually satisfy a relation which typically says that the product of certain commutators is the identity. Such a relation is difficult to deal with. In the general case the problem of finding a minimal parametrization using only multipliers of elements of the group remains open. In Theorem 1.6.4 we summarize our results concerning this problem. It is our conjecture that the parametrization given by Theorem 1.6.4 is actually minimal. Recent investigations by Chen Min support this conjecture, but it has not been shown yet. A minimal parametrization can be constructed if we use also certain twist parameters or gluing angles. That is done in Section 1.7. The twist parameters presented there are closely related t o the usual Fenchel-Nielsen gluing angles1, but they are not the same.
1.2
Mijbius transformations
We shall consider groups of conformal automorphisms of the extended complex plane C. Directly conformal automorphisms of C are orientation preserving Mobius trunsformations Z H -
az+ b cz d'
+
a d - b c = 1,
whereas indirectly conformal ones are orientation reversing Mobius transformations a?+ Z H -
L
cZ+ d'
ad
- bc = -1.
We shall concentrate on groups which act in the upper half-plane U . It is a well-known exercise in complex analysis to show that transformations (1.1) and (1.2) fix U if and only if the coefficients a , b, c and d are real. Rays or half-circles in U perpendicular t o the real axis R are called nonEuclidean lines. A Mobius transformation fixing U maps a non-Euclidean line onto a non-Euclidean line. There are the following types of Mobius transformations fixing U : 0
the identity transformation,
0
hyperbolic transformations,
0
parabolic transform at ions,
'For the usual definition of the Fenchel-Nielsen gluing angles see Section 5.5
13
1.2. MOBIUS TRANSFORMATIONS a
elliptic transformations,
a
reflections, glide-reflections.
The first four types are orientation preserving whereas the last two ones are orientation reversing. It will turn out that hyperbolic transformations are the most essential ones. Geometrically, the hyperbolic transformation
is determined by the following three parameters: a
the attracting fixed point a ( g ) = limn+m g n ( z )
a
the repelling fixed point r ( g ) = limn-,oog - n ( z )
a
the multiplier
where z is any point in C not fixed by g . Especially, k(g) > 1. The fixed points are real if and only if g ( U ) = U . In this case, the non-Euclidean line through a ( g ) and T ( g ) , the axis of g , is denoted by a z ( g ) . It has natural orientation by r ( g ) + a ( g ) . Denoting k = k ( g ) , z = a ( g ) and y = r ( g ) we obtain, from the crossratio defining k ( g ) , the following representations for g : g(z) =
(kx - y ) z - z y ( k - 1) if 3 : # c Q # Y , ( k - 1). 2 - k y
+
g(z)
= k z - y ( k - 1) if x = 00,
g(z)
= -+z(1
t
k
-
1 -) k
if
y =
(1.4)
00.
Conversely, if k > 0, x and y , x f y , are given, then the Mobius transformation g defined by formulae (1.4) has the following properties: a
if k = 1, then g = id,
a
if k
a
if k < 1, then g is hyperbolic, k(g) = l/k, a ( g ) = y and r ( g ) = z.
> 1, then g is hyperbolic, k ( g ) = k , a ( g ) = z and r ( g ) = y,
CHAPTER 1 . MOBIUS TRANSFORMATIONS
14
Since the coefficients in (1.3) are determined up to the sign, it follows by the formulae (1.4) that
+
Hence la d( > 2. Consider conjugate Mobius transformations g and g' = h o g o h-' where h : C c--) C is a Mobius transformation. Then g and g' are of the same type. Suppose that g is hyperbolic and fixes U . Then 0
g' fixes h ( U ) ,
0
4s') = h(a(g))and 4 g ' ) = h ( T ( d ) ,
0
a49') = h ( 4 7 ) ) ,
0
h maps the non-Euclidean lines of U onto the non-Euclidean lines of h(U).
The conjugacy class of a hyperbolic transformation is determined by its multiplier. In fact, for any hyperbolic transformations
g(z)= and g'(z)
az + b
a'z = c'z ~
+ b' +d '
ad - bc = 1,
a'd' - b'c' = 1,
the following conditions are equivalent: 0
g and g' are conjugate,
0
qY) =W),
0
la + dl = la'
+ d'l.
Let us consider the other types of Mobius transformations fixing U. A parabolic transformation has one fixed point only. For (1.1) this occurs if and only if ( a dl = 2. If we set k ( g ) = 1 in the parabolic case, then (1.7) remains valid. Elliptic transformations are conjugate t o rotations
+
2 H P.2
(1.8)
15
1.2. MO3ZUS TRANSFORMATIONS of the complex plane. If gl and g2 are conjugate to
z
H
ei'l z
and
z
H
eiB2z,
+
respectively, then g1 and g2 are conjugate if and only if 91 = f92 n27r. Therefore, we may define the multiplier k(g) of an elliptic g conjugate to (1.8) by setting k(g) = e", where 0 < .9 5 K.
If we denote by x and y the fixed points of g, then either
2'
= (g(z),z , x , Y>
or
= ( ! l ( z ) ,z , 2,9)
,-i19
for all z # x, y. Hence formulae (1.4) hold also in the elliptic case either with k = ei' or with k = e-i'. Moreover, since 05
2'
+ e-i' + 2 < 4
+
for all 6 E R, it follows that (1.7) is valid and .1 d ] < 2. An elliptic transformation fixes U if and only if its fixed points are complex conjugates. The composition of two orientation preserving transformations az
g(4 =
+b
5
7
ad - bc
# 0,
and
is obtained by multiplying the corresponding matrices:
(: :)(; ! ) = ( c a t dby7 ua+
Hence g(w)
(aa = (ca
@+b6 @+d6
(1.9)
+ b7)z + ap + b6
+ d y ) z + cy + d6'
For orientation reversing transformations this is not true in general. But restricting ourselves to transformations with real coefficients, the coefficients of the composite transformation are obtained by (1.9) regardless of whether any of the transformations is orientation reversing. The axis az(o) = { z I u ( z )= z }
C H A P T E R 1. MOBIUS TRANSFORMATIONS
16
of a reflection 5 fixing U is a circle or line perpendicular t o R, i.e., a non-Euclidean line in U. Denote by z and y the real fixed points of U . Then
)(.
= +(y)
+
where is the elliptic transformation defined by k(+) = -1, +(z) = z and $(y) = y. Hence, inserting k = -1 in formulae (1.4), we obtain the following representations: (1.10)
( ~ ( z )= - S - t 2y if z = 00
(1.11)
Especially, (T and '1c, agree on the real axis. A glide-reflection s fixing U is of the form
where 0
'1c, is a hyperbolic transformakion fixing U ,
a 5 0
is a reflection fixing U ,
a x ( $ ) = az(a).
+.
Hence the glide-reflection s is uniquely determined by Moreover, since s2 = $ 2 , also the hyperbolic transformation s2 defines s uniquely. Especially, s and $ have the same fixed points and the same axis. ) k = k ( s ) = -k($). Formulae (1.4) and Denote x = a(s), y = ~ ( s ant1 (1.10) then yield the following representations:
(kz - y)z - xy(k - 1 ) if z#..#y, ( k - 1)zt 2 - Icy s ( z ) = Icz- y(k - 1) if z = 00, 1 z tx(1if y = 00. s(z) = s(z)
=
x)
(1.12)
(1.13) (1.14)
If we define k(a) = -1 for a reflection 0 , then formulae (1.10) are obtained from (1.12) and (1.13) as special cases. It follows that la
+ 4 = m--J==Wl 1
for all transformations (1.2) fixing U . For reflections we have la whereas ( a -t dl is positive for all glide-reflections.
+ dl = 0
1.3. MULTIPLIER PRESERVING ISOMORPHISMS
17
A transformation (1.4) with k < -1 is loxodromic. A loxodromic transformation g has well-defined fixed points a ( g ) and r ( g ) and hence also a well-defined multiplier k ( g ) . By formulae (1.12), a glidereflection s fixing U admits also a representation
4.) = II,(z) where II,is the loxodromic transformation defined by k($) = k ( s ) , u(+) = a ( s ) and T ( + ) = T ( s ) . On the real axis, s and h?, agree. Note that II,maps U onto the lower half-plane and that is decreasing on the real axis.
+
1.3
Multiplier preserving isomorphisms
In this section, we consider groups G of Mobius transformations acting in U. We are interested in developing conformally invariant systems of identification for the groups G. Our final goal will be to define a minimal set of identification numbers. In fact, in the next sections, we will give a "social security vector" to every group with a certain normalization (Theorem 1.5.6). For precise formulation of the results we consider isomorphisms of the groups G. The next leinnia shows that the Mobius group G is in most cases determined by its hyperbolic elements.
Lemma 1.3.1 Letg and h be Mobius transformationsfixing U , h hyperbolic and g ( a ( h ) ) # r ( h ) . Then g o h" is hyperbolic or a glide-reflection for suficiently large values of n. Proof. We may suppose that u ( h ) = 00 and r ( h ) = 0. Let k = k ( h ) and consider the representation (1.1) or (1.2) of g . Then
Since g ( o 0 ) # 0, we have a
It follows that g
o
# 0.
Hence
h" is either hyperbolic or a glide-reflection for n 2 no.
If, in the above lemma, g o 1%" is a glide-reflection, then it is determined by the hyperbolic transformation ( g o h n ) 2 . Hence g is determined by the hyperbolic transformations h and ( g o hn)2 for any n 2 no.
CHAPTER 1 . MOBIUS TRANSFORMATIONS
18
We show next that, under quite general assumptions, the group G is in fact determined up to conjugation already by the multipliers of its hyperbolic elements. To that end we need some technical lemmas. The function
f(k)=
-
/*
is well-defined and non-negative for both k
= f(k2)
f@l)
t 1
=
> 0 and k = ea8. We have
fl
kl = k,
9
f(k) >_ f(1) = 2 for k > 0, 0 = f(-l) 5 f(k) 5 f(1) = 2 for k = e”,
0
if and only if
f(k) 4 00
max(k, l / k )
+ 00.
is defined for all orientation preserving transformations
fixing a disk or a half-plane and
f(s)= .I
+ dl7
> 2 e g hyperbolic,
0
f(g)
0
f(g) = 2
0
f(g)
e g parabolic or the identity,
< 2 e g elliptic,
f(gi) = f(g2) formations.
W
k(gl) = k(g2)
* g1 and g2 are conjugate trans-
Let (g,h ) be a pair of hyperbolic transformations fixing the upper hdfplane U. Suppose that g and h have no common fixed points and denote 0
t = (r(g),T ( W 7 a
’ kl = 0
w
7
k2
= k(h),
k3
= k(g
0
h).
7
.(g))7
1.3. MULTIPLIER PRESERVING ISOMORPHISMS
19
In order t o derive an expression for f ( k 3 ) in terms o f t , Icl and 1 2 we normalize by conjugation such that r ( h ) = 1, a ( h ) = 0 and a ( g ) = 00. Then t = r ( g ) and we have by formulae (1.4)
g ( z ) = Iclz - t(k1 - I),
It follows that
L e m m a 1.3.2 The multipliers k l , k2, k3 and kq = k(g2 o h ) determine t and hence also the conjugacy class of ( 9 , h ) uniquely. If only k l , k2 and kg are fixed, then t has two possible alternatives.
Proof. Retaining the above normalization we have by (1.15) either
or
Then t - t' > 0. By eliminating f ( k 3 ) we get
Similarly, replacing g by g2 we get two values t and satisfying- 7 k; k2 t+t =-2 ( k ; - 1)(k2 - 1 ) '
for r ( g ) = r ( g 2 )
+
+
Since k2 > 1, the function k H ( k k 2 ) / ( k - l ) ( k 2 - 1) is strictly decreasing f o r k > 1,and we have t+t' < t+tl'.Therefore, the sets { t , t ' } and { i,? } can share at most one point. On the other hand, r ( g ) belongs to the intersection of the sets { b , t ' } and { t, Z'}. Hence t = r ( g ) is uniquely determined.
L e m m a 1.3.3
Ic(gmi
o hni)+ 00 whenever min(rn;,ni) + 00.
Proof. By (1.15)
+
f(gm8o h n a )= f ( k ~ ' k ~ t' ) ( 1 - t )
kldmi + kTnl 1 + k y m lk;nl
I-
CHAPTER I. MOBIUS TRANSFORMATIONS
20
Since g and h have no common fixed points, we have t follows. a
# 0, and the assertion
It follows from Lemma 1.3.3 that g" o h" is hyperbolic for sufficiently large values of n.
Lemma 1.3.4 a(g"
o
h") + a ( g ) and r(g* o h " )
-+
r ( h ) as n + 00.
Proof. We may suppose that the fixed points of g and h are finite. Choose disjoint closed intervals 11 c R and 12 c R containing a ( g ) and a(h) as interior points, respectively, but not containing r ( g ) or r(h). Choose no such that g"(12) C 11 and h"(11) c 1 2 for n 2 no. Then g"(h"(11)) c 11 and it follows that a(g"oh") E 11 for n 2 no. Since r ( g n o h n ) = a(h-"og-*), it follows similarly that r ( g n o h") + r ( h ) as n + 00. a
In the next lemma we suppose that g and h share at least one fixed point.
Lemma 1.3.5 I f r ( g ) = a ( h ) , then there are indices m;+ 00 and ni such that k ( g m ; o h"*) stays bounded as i -+ 00.
--* 00
Proof. If a ( g ) # r f h ) , then (1.15) remains valid with t = 0, and we have
f ( g m i o h"') = f(k;"'/k;'>.
(1.16)
If a ( g ) = r ( h ) then gmi o h"* is conjugate to z I+ ( k r i / k g i ) zand (1.16) holds also in this case. Since kl > 1 and k2 > 1, the assertion follows. In the following theorems, we consider groups G and GI of Mobius transformations acting in the upper half-plane U . An isomorphisms j : G + GI is induced by a Mobius transformation 1c, if j ( g ) = 1c, o g o 1c,-l for all g E G. Note that is not uniquely determined by j. In fact 1c, and $ both induce j. Hence can always be chosen such that + ( U ) = U . On the other hand, an orientation preserving 1c, inducing j may map U onto the lower half-plane. The isomorphism j is type-preserving if g and j ( g ) are of the same type for all g E G.
+
+
Theorem 1.3.6 Suppose that G is generated by a finite or countably infinite set E = ( g l , g 2 , . . .} of hyperbolic transformations. Suppose that gn and g , share no fixed points for any n # m. Let j : G + GI be a typepreserving isomorphisms. I f k ( g ) = k ( j ( g ) )for every hyperbolic g E G, then j is induced by a Mobius transformation.
1.3. MULTIPLIER PRESERVING IS 0M 0R P HISMS
21
Proof. If E contains only one element, then there is nothing to prove. Let 2 1 , 22,23, z 4 be distinct fixed points of E . Suppose that 2 1 = ~ ( h l ) , 22 = ~ ( h 2 )z3 , = u(h3) and 2 4 = u(h4) where either hi E E or hr' E E , i = 1,2,3,4. To show that the points y1 = ~ ( j ( h l ) y2 ) , = ~ ( j ( h 2 ) y3 ) , = a(j(h3)) and y4 = u ( j ( h 4 ) ) are distinct, suppose, e.g., that y2 = 93. Then by Lemma 1.3.5, there exist indices mi -, 00 and ni +. 00 such that k(j(h2)m: oj(h3)n')5 M
< 00
(1.17)
as i + 00. On the other hand, the points 2 2 = ~ ( h 2and ) 2 3 = u(h3) are distinct, If we had h2 = h3, then the transformation j ( h 2 ) = j ( h 3 ) would have only one fixed point and j could not be type-preserving. Hence h2 and h3 share no fixed points. Then by Lemma 1.3.3,
which contradicts (1.17). We show next that (21,22,z3,54)
To that end, let
gln
(yl,y2,y3,y4)-
(1.18)
= h: o hy and gan = h? o h;. By Lemma 1.3.4,
T(gin) a(gin>
+
xi,
r(j(gin))
+
yi,
a ( j ( g i n ) ) yii-2, i = 1,2. Consider the pair ( 9 1 n 7 g 2 n ) . By Lemma 1.3.3, k ( g l n ) + 00 and k ( g 2 n ) -+ CQ. Since the cross-ratio of the fixed points of g l n and g2,, is bounded away from 1 , 0 and 00, it follows by 1.15 that gln0gZn and g f n o g 2 n are hyperbolic for sufficiently large values of n. Then by Lemma 1.3.2, the pairs (gin, g2n) and ( j ( g l n ) , j ( g z n ) ) are conjugate, i.e., +
5ii-21
+
from which (1.18) follows by letting n + 00. Finally, keep the points 5 2 , 5 3 and 2 4 fixed and let $ be the orientation preserving Mobius transformation defined by $ ( z ; ) = y i , i = 2 , 3 , 4 . Let 2 1 = u ( h i ) be any point distinct from x 2 , z 3 and z4 such that either hi E E or (hi)-' E E . Then by (1.18), $ ( X I ) = u ( j ( h ; ) ) ,and we have for all g ; E E
= u(j(gi)>, $(T(gi)) = T G b i ) ) , k(gi) = k(j(gi)).
$(u(gi))
22
CHAPTER I. MOBIUS TRANSFORMATIONS
Hence j( g i ) = $ogio7/h-'
for all generators g; E E , and the assertion follows.
0
For a Mobius group G acting in a disk or a half-plane, let G+ denote the subgroup of the orientation preserving elements of G. For a moment, we restrict ourselves to countable groups G satisfying the following condition: For every z E C, there exits g z E G+ such that { g E G+ I g ( z ) = z} = { g :
I n = O , f l , f 2 ,...}.
(1.19)
For example, all Fuchsian groups satisfy these conditions. The last condition states that the stabilizer { g E G+ 1 g ( z ) = z } of z E C is a maximal cyclic subgroup of G+ whenever g z # id. Theorem 1.3.7 Let G and G' be countable M6bius groups acting in U. Suppose that G satisfies (1.19) and has at least four distinct hyperbolic fixed points. Let j : G + G' be a type-preserving isomorphism. If k ( g ) = k ( j ( g ) ) for every hyperbolic g E G , then j is induced by a M6bius transformation.
Proof. Let the set E = { g 1 , g 2 , . . .} contain exactly one generator of every maximal hyperbolic cyclic subgroup of G. Let Go be the group generated by E . Then, by Theorem 1.3.6, j I Go is induced by a Mobius transformation $, i.e., j ( g ) = $ o g o $-' for all g E Go. If g E G \ Go, then g is either parabolic, elliptic, a reflection or a glidereflection. For a glide-reflection g E G, g 2 is hyperbolic. Hence
Since a glide-reflection is uniquely determined by its square, we have j ( g ) = 7/h 0 g 0 $-1. Suppose that g E G \ Go is not a glide-reflection. Choose a hyperbolic h E G such that g (a (h ))# r ( h ) (such an h exists by Lemma 1.3.4). Then, by Lemma 1.3.1, g o h" is hyperbolic or a glide-reflection for sufficiently large values of n. Then
j ( g ) o j( h " ) = j ( g o hn) = 1 ~ ,o g o hn o $-' = $ 0 9 0 $-l o $ o h" o$-' = $ago$-' o j (h " ) and hence j ( g ) = II, o g o $-l.
Corollary 1.3.8 Let G and GI be countable M6bius groups acting in U. Suppose that G satisfies (1.19) and has at least four distinct hyperbolic fixed points. Let j : G + G' be a type-preserving isomorphism. If j ( g ) = g for all g E G+, then G = G' and j = id.
1.4. PARAMETRTZATION PROBLEM
23
It follows from the Corollary 1.3.8 that it suffices in many cases to consider Mobius groups containing only orientation preserving elements. It is an interesting exercise to enumerate all groups having at most two hyperbolic fixed points.
1.4
Parametrization problem and classes 7 f , P and I
The motivation of considering isomorphisms of Mobius groups has its roots in the theory of Teichmuller spaces. However, in the Teichmiiller theory, only isomorphisms j : G1 -+ G2 induced by quasiconformal mappings are considered. This gives rise to the following definition: For k = 1, 2, let Gk be a Mobius group acting in a disk or half-plane Dk. Denote by Kk the boundary of Dk. An isomorphism j : G1 -+ G2 is geometric (on K1) if 0
j is type-preserving,
0
there exists a homeomorphism 11, : K1
-+
K2 inducing j on K1.
It follows that 11, maps the hyperbolic or parabolic fixed points of GI onto the respective fixed points of G z . Hence j preserves the cyclic order of the fixed points of G I on K1. In the following, we consider only principul-circle groups, i.e., Mobius groups acting in a disk or half-plane. Fix a principal-circle group Go and denote by J(G0) the set of all pairs ( j , G ) where G is a principal-group and j : Go + G is a geometric isomorphism. Parametrization problem. Find a set A c Go having the following property: If ( j l , GI) E J(G0) and ( j z , G z ) E J(Go), then j2 o j,' : G I -+ G2 is induced by a Mobius transformation if and only if
for every g E A. The set A pummetrites J(G0) and the numbers k(j(g)), g E A , are coordinates of (j,G) E J(G0). In view of Theorem 1.3.7, we restrict ourselves to principal-circle groups generated by hyperbolic elements. If, firstly, the group Go is generated by one hyperbolic transformation g , then A = { g } parametrizes J(G0). Secondly, let Go be generated by a pair ( 9 ,h ) of hyperbolic transformations sharing no fixed points. By Lemma 1.3.2, the set
parametrizes J(G0). However, the fourth coordinate k> = k ( j ( g z o h)) of ( j , G ) is in a special position: As soon as the first three coordinates
CHAPTER I. MOBIUS TRANSFORMATIONS
24
Figure 1.1:
ki = k(j(g)), kt = k ( j ( h ) ) and k$ = k(j(g o h ) ) are fixed, ki has only two possible alternatives. We shall prove in Theorem 1.4.3 that k> is an almost superfluous coordinate for a geometric isomorphism j . We call (9,h ) a principal-circle pair if it satisfies the following conditions: 0
g and h are hyperbolic transformations sharing no fixed points,
0
the cross-ratio t = ( T ( g ) , r( h ) ,a(h),a ( g ) ) is real.
Groups generated by principal-circle pairs (g, h ) are building blocks of all principal-circle groups. To our purposes it is necessary to limit ourselves to cases where kl = k(g), k2 = k ( h ) and k3 = k(g o h ) determine k4 = k(g2 o h ) uniquely. To that end, it suffices that t = (r(g),r(h),a(h),u(g))will be uniquely determined. This in turn will be achieved by dividing the pairs (9,h ) into three disjoint classes ‘H, P and E (cf. formula (1.15)): ( g , h ) E 7-i
(g,h)E E
*
f ( g 0 h) = t f ( W 2 )
+ (1 - t ) f ( k l / k 2 )1 2
t2 < t < t l .
Here ‘H stands for “handle”, P for “pants” and E for “elliptic”. Since ( 9 , h) is a principal-circle pair, g o h is either hyperbolic, parabolic or elliptic. Note that g o h is elliptic if and only if ( 9 , h ) E 8. Normalize the pair (g, h ) by conjugation such that a(h) = 0 a(g)
= 00
and ~ ( h=) 1, and r(g) = t .
1.4. PARAMETRIZATION PROBLEM
25
In Figure 1.1, the axes of g and h are drawn in the same z = t with the graph of
4 t ) = f ( g 0 h ) = Itf(klk2)
+ (1 - t ) f ( f l / k 2 ) l .
+ izl plane (1.20)
Then f ( g o h ) is the ordinate of the intersection point of (1.20) and the axis of g whereas the abscissa t of the intersection point gives the class of (g,h). In the class H,t = r ( g ) omits the points 0 = ~ ( hand ) 1 = r ( h ) . Therefore, f ( g o h ) omits the values f ( k l k 2 ) and f ( k l l k 2 ) = f ( k 2 / k l ) in H. Since f maps the interval [I, oa]injectively onto [2,00], we have, by Figure 1.1, the following lemma:
Lemma 1.4.1 For any k1 > 1, k2 > 1 and conjugation unique pair ( 9 , h ) E P such that k ( g ) = k1,
k ( h ) = k2,
k3
2 1 there exists an up to
k(g o h ) = k3.
(1.21)
For a pair ( g , h ) E ( k 3 - k I k 2 ) ( k 3 - k l / k 2 ) ( k 3 - k 2 / k l ) # 0. If kl > 1, k2 > 1 and k3 2 1 satisfy this condition, then there exists an up to conjugation unique pair ( g , h )E IH sutisfying (1.21). ' H j
In subsequent applications of the above lemma, we shall exclude the class & and consider only principal-circle pairs (9,h ) with non-elliptic g o h . If we then know that the class of (9,I t ) is fixed, then k l , k2 and k3 determine the conjugacy class of ( 9 ,h). Hence we need not know whether ( 9 ,h ) is actually in P or in H,it suffices to know the invariance of the class only. We show next that the invariance of the classes P and 'H is pertinent to the parametrization problem. We consider first the classes H ,P and & in detail. Considering the cross-ratios
and 1 - t = ( r ( g - ' ) , r ( h ) , u ( h ) , u ( g - 1 ) )= ( m , l , O , t ) associated with the pairs (9,h ) and (g-', h ) , respectively, we see that 0
the pairs (9,h ) , ( h ,g ) , ( g - ' , h-') and (h-', g - l ) are in the same class,
a
the pairs (g-l, k ) , (Ii,g-'), ( g , h-') and ( h - l , g ) are in the same class.
For a moment, we normalize by conjugation such that g and h map the unit disk D onto itself. Then g and h have well-defined isometric circles I ( g ) and I ( h ) . In general, I(g) is defined by the following properties (Figure 1.2):
CHAPTER I. MOBIUSTRANSFORMATIONS
26
Figure 1.2: 0
I(g) is perpendicular to az(g) and to the unit circle
0
g(I(g)) and I(g) have the same radius.
K,
It follows that g(I(g)) = I ( q - ' ) and g maps the inside of I(g) onto the outside of I(g-’). Since g and h share no fixed points, we may suppose that
a(h) = 1 and r ( h ) = -1, a ( g ) = ei’ and r(g) = -efi',
0 < 19 < R .
In Figure 1.3, three different alternatives 3.1-3.3 for the cyclic order of the fixed points of g and h are represented. Here 3.1 contains the whole classes P and & and possibly a part of H . The rest of the class 'H is contained in 3.2 and 3.3, cf. Figure 1.1. The case 3.1 has five different subcases 3.1.1-3.1.5 which are found by drawing the isometric circles of y, h, 9-l and h-l. 3.1.1. t
(9,h ) E Int P,the interior of P,
0
I ( h ) and I(g-l) are exterior to each other.
3.1.2. 0
t=t2,
(9,h ) E B d P , the boundary of P,
27
1.4. PARAMETRIZATION PROBLEM
3.2 O
3.1
t < O
3.1.1 t < t2
3.1.2
3.1.4 t = tl
3.1.3
t2
3.3
t>O
< t < tl
3.1.5 tl
Figure 1.3: a
I ( h ) is exterially tangent to I ( g - l ) ,
a
the tangential point x is fixed by the parabolic transformation g o h.
3.1.3. a
tz
( 9 , h ) E &, a I ( h ) and I ( 9 - I ) intersect, a the intersection point 2 is fixed by the elliptic transformation g o
h.
3.1.4. a
t=tl,
a
(g,h) E Bd H, the boundary of H,
a
I ( h ) and I(g-') are interially tangent to each other,
a
the tangential point is fixed by the parabolic transformation g o h.
CHAPTER 1. MOBIUS TRANSFORMATIONS
28
3.1.5. 8
ti < t < O ,
0
( 9 , h) E Int 'H, the interior of 'H,
0
one of the circles I ( h ) and I ( g - l ) is interior to another.
The interior of 'H consists of the topologically different subclasses 3.1.5, 3.2 and 3.3. Pairs with intersecting axes represent real handles. Therefore, the subclass 3.2 of 'H is denoted by 'HR. After this detailed listing of different alternatives we can prove that the classes 3-1, P and I: are invariant under geometric isomorphisms. The treatment of the parametrization problem will be based on this result.
Theorem 1.4.2 Let Go and G be principal-circle groups, j : Go -, G a geometric isomorphism and g , h E Go hyperbolic elements sharing no fixed points. Then the pairs ( 9 ,h ) and ( j ( g ) ,j ( h ) )are both in the same class'H, P or &. Proof. Denote g' = j ( g ) and 12' = j ( h ) . Let t', t; and t i be the parameters associated with the pair (g', h'). Suppose that t < tz. Since j preserves the cyclic order of the fixed points and the types of the transformations, we have, by 3.1.1.-3.1.5, either t' < t i or ti < t' < 0 . In case 3.1.1, the fixed points a ( g ) and r ( g ) bound an arc of the unit circle not containing points x’ and y’ such that h(x') = y'. Similarly, a ( h ) a n d ~ ( hbound ) a n arc not containing points x’ and y' such that g ( d ) = y'. Hence the cases 3.1.1 and 3.1.5 cannot be geometrically isomorphic, and it follows that t' < t i . Suppose that t = t2. Since j is type-preserving and g o h is parabolic, we have either t' = ti or t' = ti. In cases 3.1.2 and 3.1.4 the cyclic orders of the fixed points of g , h and g o h are different. Hence t' = t i . Since we can apply the same reasoning to j - ' , we have proved that ( 9 , h ) E P if and only if (g',h') E P . Moreover, since j is type-preserving, ( g , h ) E & if and only if (g', h') E f, and the assertion follows. We can now show that the fourth coordinate ki is superfluous if Go is generated by a pair of the class P or 'H. Theorem 1.4.3 Let the Mobius group Go be generated by a principal-circle pair ( g , h). If goA is non-elliptic, then A = { g , h , g o h } parametrizes J ( G 0 ) .
Proof. Let ( j i , G i ) E J(Go) a n d (jz,Gz) E J(G0). Since g o h is nonelliptic, ( 9 , h ) is in P U 'H. By Theorem 1.4.2, the pairs (jl(g),jl(h)) and
29
1.5. G E O M E T R Y OF T H E CLASSES
Figure 1.4:
( j 2 ( g ) ,j 2 ( h ) ) are in the same class P or 3-1. Suppose that k ( j l ( g ) = k ( j 2 ( g ) ) , k ( j l ( h ) ) = k ( j z ( h ) ) and k ( j l ( g o h ) ) = k ( j z ( g o h)). Then, by Lemma 1.4.1, the pairs are conjugate. Since they generate G1 and G2, respectively, j2 o j,' : G1 -+ G2 is induced by a Mobius transformation.
1.5
Geometrical properties of the classes P and
7-l For later reference, we consider geometrical properties of the principal-circle pairs ( 9 , h). Especially, we study the commutator [g,h] = h o 9-l o h-' o g of g and h. Lemma 1.5.1 If ( 9 , h ) E Int P , then g o h and h o g are hyperbolic, the axes of g , h, g o h and h o g are disjoint i n pairs, and the cyclic order of the fixed points is given b y Figure 1.4.
Proof. Normalize by 3.1.1. Since the pairs ( g , h ) and ( h , g ) are both in Int P , g o h and h o g are hyperbolic by Figure 1.1. Let L be the non-Euclidean line in D perpendicular to I ( h ) and I(g-'), see Figure 1.5. By symmetry, h ( L ) = g - ' ( L ) is perpendicular to I ( g ) and I(h-'). Since ( g 0 h ) ( L ) = g(Y-'(L))
=L
and
(A 0 g)(g-1( L ) ) = h ( L ) = g - ' ( L ) , we have L = a z ( g o 11) and g - ' ( L ) = a z ( h o g ) , and the assertions follows.
To study the commutator of intersect, i.e., ( 9 , h ) E Z R .
r~ and 11,
suppose that the axes of g and h
30
CHAPTER I . MOBIUS TRANSFORMATIONS
Figure 1.5:
Lemma 1.5.2 FOTthe pair ( 9 , h ) E 7 - 1 ~the ~ commutator c = [ g , h] is hyperbolic if and only if ( h ,g-' o h-' o g ) E Int P. Proof. Denote h' = g-' o h-' o g. To consider the class of the pair (h,h'), let t = ( ~ ( h ) , ~ ( h ' ) , a ( h ' ) , u (and h ) ) k = k(h) = k(h'). Then
We may suppose that a ( h ) = Since
00,
a(h') = 0, r(h') = 1 and
(h)= t .
we have g ( 0 ) = t and g ( 1 ) = 00. On the other hand, the ax; o g ,,itersects with the axes of h'and h'. Froni g ( 1 ) = 00 it then follows that u(g) < t < 0 < r ( g ) < 1 , as depicted in Figure 4.6. The commutator c = h o h' is hyperbolic if and only if (h,h') E Int P U Intlf, i.e., if and only if t < t2 or tl < t . Since tl = 0 and t < 0, the assertion follows. o
1.5. GEOMETRY
OF THE CLASSES
31
g-' o h-' o g
1
0
t
Figure 1.6: Suppose that ( 9 , h) E ’HRand that c = [ g , h] is hyperbolic. Then ( h , g - ' o h-' o g ) E Int P, and we obtain, by Lemma 1.5.1, the following Figure 1.7 showing how the axes of g , h, c = h o g-' o h-' o g and g-' o h-' o g o h are located.
We consider next what can be said about the pair ( g , h ) E ’HR if the multipliers k(g), k ( h ) and k ( c ) are known. Theorem 1.5.3 Let ( 9 , h) E 'HR be a pair with hyperbolic c = [ g , h ] . If the multipliers Icl = k ( g ) , kz = k ( h ) and k4 = k ( c ) are known, then k3 = k ( g o h ) has two possible values except in the cuse 1
f(k4) t 2 = q ( f ( k 3 when
k3
- 2)(f(kX) - 2)
(1.22)
is uniquely determined.
Proof. A lengthy but straightforward calculation yields f(k4)
= It(1 - t > ( f ( k : >- 2 ) ( f ( G ) - 2) - 21
with t = ( T ( g ) , T ( h ) , a ( h ) , u ( g ) ) , O< t < 1. Since f(k4) we have in fact f(k4)
= t(1 - t)(f(k?)
-
> 2 and t ( 1 - t ) > 0,
2 ) ( f ( G ) - 2) - 2-
(1.23)
CHAPTER 1 . MOBIUS TRANSFORMATIONS
32
g-’
o
h-’ o g o h
Figure 1.7: On the other hand,
Eliminating t we then obtain t(1 - t ) =
- ( f ( k 3 )- f ( k l / k 2 ) ) ( f ( k l k Z )- f ( k 3 ) ) f (k4) + 2 ( f ( k l k 2 )- f ( k l / k 2 N 2 (f(k3 - 2)(f(k,2) - 2) -
(1.24) With respect t o f ( k 3 ) , the equation is of the second degree. Hence k3 has at most two possible values. The last assertion follows by considering the discriminant of the equation.
Corollary 1.5.4 For the pair ( 9 ,h ) E 7 - l ~with hyperbolic c = [ g , h], the axes of g and h are perpendicular if and only if (1.22) holds. In other cases k1, k2 and k4 determine the acute angle between the axes of g and h uniquely. Proof. By (1.23), the case (1.22) occurs if and only if t = 1/2. This in turn occurs, by Figure 1.1, if and only if the axes of g and h are perpendicular. Suppose that t # 1/2 and denote by k3 and k i the two values of k ( g o h ) . If
then by (1.24), t(1 - t ) = t‘(1 - t’). Hence t’ = 1 - t . The assertion follows by Figure 1.1.
1.5. GEOMETRY OF THE CLASSES
33
Corollary 1.5.5 Let ( 9 , h ) E 7 - t ~be a pair with hyperbolic c = [g, h]. Then
(1.25) Especially, if k2 < 1
+E,
then
kl
> 16/c2.
Proof. In (1.23) we have 0 < t( 1 - t ) < 1/4. Hence 1
2 < f(k4) < q ( f ( k 3 - 2)(f(k22) - 2) - 2 and
16 < (kl - 2
1 + -)(k2 k1
-2
+ -)k21
=
(k1 - 1)’(k2 - 1)2 k1 k2
from which (1.25) follows. Finally
-kl > (kl4k1 4
>
4k2 (k2 - 1)2
’4 ( 1 + ~ )> 4
-.o
&2
&2
We call a hyperbolic g E G a primary element of the principal-circle group G if, for any z E a z ( g ) ,the interval of a z ( g ) bounded by z and g ( z ) contains no pair of points equivalent under G. Let ( g , h ) be a principal-circle pair. Suppose that g and h have nonintersecting axes. Then, replacing g by 9-l if necessary, we may suppose that t= a(%+)) < 0. (1.26)
(a,
Theorem 1.5.6 The pair ( g , h ) satisfying (1.26) is in Int P if and only if 0
0
g o h is hyperbolic,
g and h are primary elements of the group ( g , h ) generated by g and h.
Proof. By (1.26), the pair ( g , h ) satisfies exactly one of the cases 3.1.13.1.5. The transformation g o h is hyperbolic if and only if either 3.1.1 or 3.1.5 occurs. If this is the case, then g and h are both primary elements of ( 9 , h) if and only if 3.1.1 holds. o
dD
Normalize such that g and h fix the unit disk D . The hyperbolic metric of D is defined by the line element ds =
214 1 - 1.12‘
34
CHAPTER 1 . MOBIUS TRANSFORMATIONS
We have, for a hyperbolic transformation g : D + D,
where the equality holds if and only if z E a x ( g ) . Hyperbolic distances are invariant under Mobius transformations fixing D ,and geodesics of this metric are non-Euclidean lines. Let do(L1, L z ) denote the shortest distance between two non-Euclidean lines L1 and Lz.
Theorem 1.5.7 For the pair ( g , h ) E Int P , let log k = do(az(g),az(h)),
kl = k(g) and kz = k ( h ) . Then
Proof. Normalize by 3.1.1 and denote by i y the intersection point of az(g) with the imaginary axis. If a ( g ) = ei@and r ( g ) = -e-", then
Hence - cos 6
1 =1 - 2t'
Denote by L the circle determined by a x ( g ) . Since L and K are orthog- 8 ) . BY onal, the point i/y lies on L. Hence L has the radius T = Figure 1.8, 1 - y2 t a n a = -cot19 = r = 2 ' and it follows that
3(
Since ( g , h ) E Int P , we have t
< t2 and
The assertion follows now from k = (1
+ y)/(l-
Y).
0
Corollary 1.5.8 If, under the hypotheses of Theorem 1.5.7, kj j = 1,2, then k > 8/c2.
< 1 + <~ 2,
1.5. GEOMETRY OF T H E CLASSES
35
Figure 1.8: Proof. For all
E,
0 < E < 1, we have
(1
+
1
€)+
< 1 + -&2
and (1
+
&)-+
1 2
3 8
< 1 - -& + - & 2 .
Hence f ( 1 t E)
3
< 2 + -8E 2 .
Consequently
f ( l + ~ ) + 2 4 + $ ~ 8~ >> -.o f(l+&)-2 $&2 9
Let (gi,g2) E Int P be a pair of hyperbolic transformations fixing D. Denote Q3 = g2-' 0 g;'.
36
CHAPTER 1 . MOBIUS TRANSFORMATIONS
Figure 1.9: Replacing 91 and 92 by 9;' and 9;' if necessary we may suppose, by Lemma 1.5.1, that the ordered triple of points a(93), a ( g 2 ) , a(g1) defines the positive orientation of the unit circle I(, cf. Figure 1.9. In the rest of this section, the normalization of Figure 1.9 is assumed t o be fulfilled. Hence, when conjugating pairs ( q 1 , g z ) E I n t P , we may conjugate only by orientation preserving Mobius transformations fixing D. The next lemma shows that 91, g2 and g3 are in quite a symmetric position :
Proof. We show e.g. that (92,93)E Int P. Since ggl ogT1 = g1 is hyperbolic, the pair (92,93)can be conjugated, by 3.1.1-3.1.5,such that either 10.1, 10.2 or 10.3 in Figure 1.10 holds. In all cases the non-Euclidean line L perpendicular t o I ( 9 3 ) and t o I ( g T ' ) is the axis of 91 (cf. Figure 1.5). Comparing with Figure 1.9 we see that only the case 10.1 remains, i.e., ( g 2 , g 3 ) E I n t P .
We show next that the class Int P is, in a sense, transitive. Let g and 1/, be hyperbolic transformations fixing D. Then generally
i.e., isometric circles do not behave nicely under conjugation. However, we have:
1.5. GEOMETRY OF THE CLASSES
37
L
10.2
10.1
10.3
Figure 1.10:
CHAPTER 1. MOBIUS TRANSFORMATIONS
38
Figure 1.11: Lemma 1.5.10 Ifax($) is the diameter of D perpendicular to a z ( g ) , then
I(+ 0 9 O +-? = $(l(s)). Proof. By symmetry, $ ( I ( g ) ) and + ( l ( g - ' ) ) have the same Euclidean radius. Since they are in addition perpendicular t o m(+ o g o +-') = + ( u z ( g ) ) and t o I ( , the assertion follows. Theorem 1.5.11 ( g l , h1)
If(gl,g2)
E I i i t P , ( h l , h 2 ) E I n t P and g 2 = h;', then
E Int P .
Proof. Conjugate such that r(g2) = -1, a(g2) = 1, a ( g l ) = e'd and T ( g l ) = -,-i8 , see Figure 1.11. By the normalization of Figure 1.9, a z ( h l ) lies then
in the lower half-plane. The non-Euclidean distances of the axes of g l , g 2 and hl satisfy dD(az(gl),az(hl)L ) d ~ ( a z ( g 1a)z, ( g 2 ) )
+ dD(az(gz),a z ( h i ) ) ,
(1.27)
where the equality holds if and only if az(h1) is perpendicular t o the imaginary axis. These observations follow by considering the non-Euclidean line perpendicular t o the axes of g1 and h l . Let y ~ jj, = 1 , 2 , be the hyperbolic transformation for which
' cpj(D) = D ,
1.5. GEOMETRY
39
OF THE CLASSES
Figure 1.12:
= a+),
0
U%(cpj)
0
the axis of y j o hl o 9;’ is perpendicular to the imaginary axis.
By (1.27), Figure 1.12 holds. Since ( h l ,h z ) E Int P,the isometric circles of hi' and y2 o hl o 9;' are exterior to each other by 3.1.1. By Figure 1.12, also I(&') and I ( y 1 o hi o yT1) are exterior t o each other. On the other hand, also I(g2) = Z ( 1 ~ 2 ~and ) Z(gli) are exterior to each other. Let be the hyperbolic transforination for which
+
+(D)= D , 0
u z ( $ ) is the imaginary axis,
0
r ( + o y1
0
u($
0 Ir1 0
9;l
0
0 9 1 0 Ill 0 y;1 0
$-I)
= -1,
$-I) = 1,
+-'
+
Then, by Lemma 1.5.10, the isometric circles of $ o g1 o = o 91 o g1 o 9;' o +-' and $ o y1 o h l o y;' o +-l are exterior to each other and the assertion follows by 3.1.1.
CHAPTER I. MOBIUS TRANSFORMATIONS
40
Figure 1.13:
1.6
Parametrization of principal-circle groups by multipliers
In this section, we consider principal-circle groups G acting in the upper half-plane U. Suppose that G is generated by a set
of hyperbolic transformations allowing the following normalization (Figure 1.13): a(gi) = 1, r(g1) = 5 < 0, (1.28) 4 g 2 ) = 00, r(g2) = 0, i = 3 , 4 , . .. . T ( g ; ) < a ( g i ) < 5,
Lemma 1.6.1 Let E = {gl,gZ,. . .} be a set of hyperbolic transformations satisfying (1.28). If the classes of the pairs (g;, gl) and (gi,g2), i = 3,4,. .., are fired in P U E, then the numbers k(gi), k(gi+l o gl) and k(gi+2 o g2), i = 1,2,. . ., determine E uniquely. Proof. Since (g2,gl) E X,the point 2 = r(g1) is uniquely determined by Leiiiina 1.4.1. Choose i 2 3 and let y and y’ be two candidates for g; satisfying
’ k(Y) = W), k(YOlIl) = w o g l ) ,
k(Y
092)
= k(Y’
0
921,
1.6. P A R A M E T R l Z A T I O N B Y MULTIPLIERS
41
0
( 7 , g I ) and (y’,g l ) are in the same class P or H ,
0
( 7 , s ~and )
(y',g2) are in the same class
P
or
H.
Then it suffices t o show that y = yl. Suppose that y # 7'. By Lemma 1.4.1, the pairs ( y , g l ) and well as the pairs (y,g2) and ( ~ ' ~ 9are 2 ) conjugate. Since r ( y )< a(y) < x
and
r ( y ' ) < a(y')
(7l,g1)
as
< 2,
there are hyperbolic transforinations .11, and a such that
y’ = a o y 0 o-1, y’ = .11, 0 y 0 + - I ,
o(0)= 0, +(1) = 1,
a(m) =
$(.)
00,
= 2.
y1 and yz denote the fixed points of y . Then + ( y l ) = a ( y l ) and + ( y z ) = u ( y 2 ) . Since u ( z ) = k z for k = k ( a ) or k-’ = k ( a ) , we have
Let
Let generally, by formulae (1.4)-( 1.6),
'(')
=
(ak - r ) z - ar(k - 1 ) ( k - 1). - k r a '
+
( 1.29)
k > 0 , k # 1, be the hyperbolic transformation with the real fixed points a and r and with the multiplier m a x ( k , l / k ) . If there exist real numbers y1 and yz such that y2+(y1) = y l + ( y 2 ) , then, by direct calculation, ( 1.30) If we insert a = 1, r = x < 0 , y1 < x and impossible. Hence = id and y = y’. o
+
y2
< x, we obtain k < 0 which is
Theorem 1.6.2 Suppose that the principal-circle group Go is generated by a set EO = { g l , g z , . . .} of hyperbolic transformations satisfying (1.28). Suppose that the trunsformations g, o g1 and g; o g2 are non-elliptic f o r i = 3,4,. ... Then A = {gi,gi+l 0 g',y;+z o g2 1 i = 1,2,. . .) parametrizes J(G0). Proof. Choose ( j k , G k ) E J ( G o ) , k = 1,2. Since j , : Go + GI and j , : GO + Gz preserve the cyclic order of the real fixed points of Go, the sets
CHAPTER 1. MOBIUS TRANSFORMATIONS
42
jl(E0) and jz(E0) are conjugate to sets El and E2, respectively, for which conditions of the type (1.28) are valid. Suppose that
for i = 1 , 2 , . . . . Since the pairs (gi,gl) and (gi,gZ) are in P U 3-1 for i = 3 , 4 , . . ., we have, by Theorem 1.4.2 and Lemma 1.6.1, El = E2, and the assertion follows. Retaining the assumptions of Theorem 1.6.2, suppose that
is a finite set. Then the parametrizing set A contains the following 3s - 3 elements 0
g;, i = 1, ..., s,
a
g i o g 1 , i = 2 ,...,s ,
a g ; o g 2 , i = 3 ,..., s.
The result of Theorem 1.6.2 is best possible if Go is generated freely by Eo. Hence, if we want to reduce the number of the elements of the parametrizing set A , we have t o consider groups with defining relations. If follows from (1.28) that g1 and 92 have intersecting axes. This assumption was needed in proving that k in (1.30) is negative. If the axes of g1 and g2 do not intersect, then k(gi), k(gi o g l ) and k(g; o 92) do not determine g; uniquely. This fact will make trouble in the proof of Lemma 1.6.3. The uniformization theory constitutes the connecting link between surfaces and principal-circle groups. Surfaces are represented as quotients of a disk or a half-plane by principal-circle groups, and principal-circle groups corresponding t o a surface are isomorphic t o its fundamental group. We shall see later that Theorem 1.6.2 gives minimal parametrizing sets for principal-circle groups corresponding t o non-orientable or non-compact surfaces. It remains the rather complicated case of the compact and orientable surfaces. The fundamental group of a compact and orientable surface of genus p is generated by 2 p elements 71, . . .,~2~ with the defining relation (1.31)
43
1.6. PARAMETRIZATION B Y MULTIPLIERS
Figure 1.14: If, in the usual notation, gk is the Mobius transformation corresponding to Y k , then gk o g; corresponds to ’)’;Yk. For our purposes it is noteworthy in relation (1.31) that it gives a representation for the commutator -1 -1 Y 2 p - l Y 2 p YZp-lY2P
in terms of 71,. .. , y z P - 2 . In order to find a minimal parametrization by multipliers, it suffices t o know that principal-circle groups corresponding to compact and orientable surfaces can be characterized as follows. Consider a set E = {gl, . . .,gzP} of hyperbolic transformations fixing the upper half-plane U. Suppose that the following conditions are satisfied: The transformations g; o yl, i = 3 , . . ., 2 p - 2, and g; o g2, i = 3 , . . ., 2 p are non-elliptic. The coinmutator c p = [g2p-l,g2p] is hyperbolic and it has a given representation in the group generated by {gl, . . .,g2p-2}. 0
E is normalized by
a(g1) = 1, a ( g z ) =
00,
~ ( g 2= ) 0 and
T(g1)
=x
< 0.
For any g;, i = 3 , . . . , 2 p - 2, the cyclic order of the fixed points is given by Figure 1.14.
A set E satisfying the above conditions is said to be of compact type. A group G is of c o m p a c t type if it is generated by a set conjugate to E . The number p is called the genus of E or G. Hence we allow, for a moment, some
CHAPTER 1 . MOBIUS TRANSFORMATIONS
44
ambiguity in the definition of the genus of a group. However, if a compact and orientable surface of genus p is a represented as a quotient U / G , then p is the smallest number satisfying the above definition. In the following lemma, we give a minimal set of multipliers determining E uniquely. Lemma 1.6.3 Let E = { 91,. . .,gzP} be a set of compact type. Suppose that the classes of the pairs (gi,gl), i = 3 , . . . , 2 p - 2, and (g;,g2), i = 3 , . . ., 2 p , are fixed in P U H . Then the following 6 p - 4 numbers 0
k(g;), i = 1,. . . , 2 p ,
0
k(g; o gl), i = 2 , . . . , 2 p - 2 ,
0
k(g; o 9 2 ) , i = 3 , . . ., 2 p ,
0
4 2 p - 1 og2p)
determine E uniquely. This set is minimal. Proof. Firstly, give the following Gp - 9 multipliers:
i = 1,. . .,2 p - 2 ,
0
k(y&
0
k ( g ; 0 g1), i = 2 , . . . , 2 p - 2 ,
0
k(g; 0 g2), i = 3 , . . ., 2 p - 2 .
Then, by Lemma 1.6.1, the set (91,. . .,g2p-2} and hence also the commutator cp = [g2p-1, gzP]are determined. Assume that 0
qgzp-1)
and
%2p)
are given. Then k.(g2p-l o g z P ) has (at most) two possible values by Theorem 1.6.2. Hence, by Lemma 1.4.1, also the cross-ratio
has at most two possible values. To choose one of these we have to spend one parameter, i.e., we have to suppose that also 0
Q2p-10
Y2p)
is given. Since (g2p-l,g2p) E H , the pair conjugation. Give the multiplier
(g2p-1,g2p)
is determined up to
1.6. P A R A M E T R I Z A T I O N B Y MULTIPLIERS
45
Suppose that ( g i p - l , g & , ) is another candidate for the pair ( g ~ ~ - - l , g 2Then ~). there exists a Mobius transformation 11, fixing U such that = 11, og2p-1
g:p-1
s:,
= 11, og2p
0
$5
0 $-I.
Since ( g ~ ~ - - l , gand 2 ~ )( g i p - l , g i p ) have the same commutator c p , we have c p = 1c, 0 c p 0 +-I.
Hence 11, fixes the axis of c p . By the normalization of Figure 1.14, II,maps the interval [T, a] increasingly onto itself. Hence 11, is hyperbolic or the identity transformation. Since also (g2p,92) and (9:,,92) are conjugate, we have by formulae (1.29) and (1.30) two alternatives: Either 1c, = id or
‘(’)
=
( a k - T ) Z - a r ( k - 1) ( k - 1). - ~r a
+
with
k=
T(Y1
- “XY2 -
“1
“(Yl
- .)(Y2
4‘
-
Hence, to distinguish between these two alternatives, we have t o spend one more parameter. Suppose, therefore, that also Ng2p-1 o g 2 )
is given. To show that then only the case 11, = id remains, denote 01 = ~ ( g 2 ~ - and 1 ) 02 = a(gzP-1). Then, similarly as for g2p, we get an expression for k: k = T ( V 1 - .)(% u(v1 - T ) ( V 2
Hence
yl-T v1 -.^__--.01-T
y1-a
-
.>
-T)’
y2-av2-r y 2 - T v2-a.
But this is impossible since ( 0 1 , y l , a , ~ > ) 1 and ( y 2 , 0 2 , a , ~ < ) 1. Hence 11, = i d . We have seen that 6 p - 4 multipliers determine E uniquely. If we drop the multipliers k(gzP-1 0 g 2 ~ and ) k(gaP-1 0 9 2 ) and keep the remaining 6 p - 6 multipliers fixed, then the set (gl, . . ,,g2p-2} is fixed but the pair ( g 2 p - 1 ,g2p) has at most four alternatives. The remaining 6 p - 6 multipliers are all essential: If one of them is dropped, then there are uncountably infinite set of alternatives with the same 6 p - 7 remaining parameters.
CHAPTER 1. MOBIUS TRANSFORMATIONS
46
Suppose that the essential 6p - 6 multipliers are given. Then fixing of the value of k(gi?p-l o g2p) reduces the number of the alternatives from four to two and finally k(g2p-10g2) makes the choice between the remaining two cases. o In the next sections, we shall investigate the geometric meaning of the inessential” parameters l ~ ( g 2 ~ -o1gzP) and k ( g ~ o~ g2). - ~
LC.
Theorem 1.6.4 Suppose that the reflection group Go is generated by a set Eo = {gl, ...,gzP} of compact type. Then the following 6 p - 4 elements gi, i = 1, ...,2p,
g i O g l , i = 2 ,..., 2 p - 2 , 0
g;og2,i=3
’ QZp-1
, ” . ) 2p,
0 g2p
constitute a niinimal parametrizing set A of J(G0). Proof. Since the pairs (gi,gl), i = 3 , . . .,2p - 2, and (g;,g2), i = 3 , . . . , 2 p , are in P tl ‘H, Theorem 1.4.2 and Lemma 1.6.3 can be applied, and the assertions follow similarly as in the proof of Theorem 1.6.2. Theorem 1.6.2 gives a parametrizing set for J(G0) containing 6p - 3 elements. Hence the relation of Go derived from (1.31) reduces the number of elements of a minimal parametrizing set only by one. In the next sections we shall show that it is possible to parametrize J(G0) by 6p - 6 numbers if two of them are not multipliers but functions of multipliers. It is open question whether all minimal parametrizing sets of J(G0) contain (at least) 6p - 4 elements.
Orthogonal decompositions and twist parameters
1.7
In this section, we derive a parametrization by 6 p - 6 parameters for compact type groups of genus p. To that end, we continue the study of the coinmutator c = [g,h] of two hyperbolic transformations. Consider two Mobius transformations @ I and @ 2 fixing e.g. the upper half-plane U ,and let L be a non-Euclidean line in U. We say that h = @2 o 9 1 is an orthogonal decomposition with respect to L if either 91 and L
are hyperbolic, their axes are perpendicular and a z ( @ l )=
47
1.7. ORTHOGONAL DECOMPOSITIONS
or 0
@I
= i d , 4 9 is hyperbolic and az(iP2) and L are perpendicular.
Before considering the existence and uniqueness of orthogonal decompositions we prove the following lemma:
+
+
Lemma 1.7.1 Let h ( z ) = ( a z b ) / ( c z d ) , ad - bc = 1, be a hyperbolic transformation fixing U . Then abcd # 0 i f and only i f h(O) # 0,w and h(m) # 0,w. I n this case, we may choose a > 0 , b > 0 , c > 0 and d > 0 if and only i f r ( h ) < 0 < a(Jz).
Proof. Since h(0) = b / d and h(w) = a / c , the first assertion holds. Suppose, that abcd # 0. The fixed points X I = a ( h ) and 2 2 = r ( h ) satisfy the equation c x 2 - (U - d ) z - b = 0. ( 1.32) Since 2 1 x 2 = -b/c, we have ~ 1 x < 2 0 if and only if bc > 0. Suppose that r ( h ) < 0 < a ( h ) . Then h ( 0 ) = b / d > 0 and bc > 0. Choose b > 0. Then c > 0 and d > 0. From ad - bc = 1 it then follows that a > 0. Suppose conversely that a > 0, b > 0 , c > 0 and d > 0. Then a ( h ) r ( h )< 0. Since h(0) = b/d > 0 , we have r ( h ) < 0 < a ( h ) .
Theorem 1.7.2 Let L be a non-Euclidean line in U and let h be a hyperbolic transformation fixing U . If ax( h ) and L intersect, then there exists a unique orthogonal decomposition h = o @ 1 with respect to L .
Proof. We may suppose without loss of generality that L is the positive imaginary axis and a ( h ) > 0. Since a z ( h ) and L intersect, we have ~ ( h<) 0. Let h ( z ) = ( a z + b ) / ( c z + d ) , a d - bc = 1. By Lemma 1.7.1, we may suppose that a > 0, b > 0 , c > 0 and d > 0. Let @ 2 0 @ 1 be an orthogonal decomposition with respect t o L. Let x > 0 and -x be the fixed points of @ 2 . Then by formulae (1.4)-(1.6), @l(Z)
= k'z,
@ 2 ( 4
=
We have * 2 ( @ 1 ( z ) )=
k'
> 0,
( k +- 1)zz + x 2 ( k - 1 ) , k>O. ( k - 1). ( k 1).
+ +
+
+
( k 1)k'xz + x 2 ( k - 1) -a z b cz + d ( k - 1)k'z + ( k + 1)"
CHAPTER 1. MOBIUS TRANSFORMATIONS
48 if and only if a = c
=
(k
+ 1)k‘
x(k - 1) 2 m ’ d=- k + l 2 m ’
b=
2422 ’ ( k - 1)k’ 2 2 m
’
i.e., if and only if
Theorem 1.7.3 Let ( @ I , @ z ) be a principal-circle pair with intersecting axes, i e . , ( @ 1 , + 2 ) E H R . Then h = @*
0
(1.33)
@1
is an orthogonal decomposition i f and only if
Proof. B y Figure 1 .l, (1.33) is orthogonal if and only if
t = (r(@1),T(@z), Since
(@I, @2)
.(@2),
1 a ( % ) ) = 2.
E H R , this occurs if and only if
f(W =
1 s[f ( k ( @ l P ( @ 2 )+) M @ l ) / k ( @ 2 ) ) 1 .
The assertion follows by simple calculation. Since f ( i d ) = 2 , the formula (1.34) holds for all orthogonal decompositions h = @ 2 o $1. Let L be an oriented non-Euclidean line in U ,i.e., denote one of the ideal end points of L by r ( L ) and the other by a ( L ) and let the positive direction on L be defined by r ( L ) + a ( L ) . The axis of a hyperbolic transformation h has a natural orientation given by ~ ( hand ) a ( h ) . Then h translates the points of a x ( h ) towards a ( h ) , i.e., to the positive direction. Suppose that L and a x ( h ) intersect. Let a ( L ,h ) be the angle between L and a z ( h ) determined by the positive orientations of L and a z ( h ) . In Figure 1.15, we have the same normalization as in the proof of Theorem 1.7.2.
1.7. ORTHOGONAL DECOMPOSITIONS
49
0
-X
Figure 1.15:
Theorem 1.7.4 Let h = @ 2 o $1 be u n orthogonal decomposition with respect to L . Then k ( h ) k ( Q 2 ) . Moreover
>
--
a ( L , h ) = n / 2 I$1 = id a k ( h ) = k ( @ 2 ) , 0
cw(L,h) < n / 2
0
a( L , h ) > 7r/2
= a@), u( @ I ) =
r( L ) .
2 2, we have by (1.34) f ( h ) 1 f ( Q 2 ) . Then k ( h ) 2 the function k H f(k) is strictly increasing for I; 1. The equality holds if and only if f(@,) = 2, i.e., $1 = id. In this case, h = @ 2 and a ( L , h ) = n/2. Normalize by a ( L ) = 00, r ( L ) = 0, X I = a ( h ) > 0 and 2 2 = ~ ( h<) 0 (Figure 1.15). Let h ( t ) = ( a z b ) / ( c z d ) , ad - bc = 1 with a > 0, 6 > 0, c > 0 and d > 0 (cf. Leiiinia 1.7.1). Then by (1.32) X I + 2 2 = ( a - d ) / c . On the other hand, by the proof of Theorem 1.7.2, Proof. Since
f(@l)
>
k ( @ 2 ) because
+
+
U
@&) = -z. d
Hence
CHAPTER 1. MOBIUS TRANSFORMATIONS
50
Consider a pair ( 9 , h ) E
XR whose
commutator
c = [ g , h ]= hog-’ o h - 1 o g
is hyperbolic. Let h = t o L = a z ( g ) . Then 9:'
o 91 be the orthogonal decomposition with respect and g f l commute, and it follows that c
= 19, hl = [g, 9 2 1 .
Hence only the component 9 2 of h whose axis is perpendicular to a z ( g ) contributes to the coinmutator of g and h. By Theorem 1.7.4,
k(h) L
W2).
Moreover, by Theorem 1.5.3 and its Corollary 1.5.4,
Hence k(c) and k ( g ) determine k(92)uniquely. Let k1 = k ( g ) and k d = k(c). Define ko > 1 by the formula
On the other hand, define
0 1
if if if
-1
=id, ~ ( 9 1=) u ( g ) , u(@pl) = r ( g ) . 91
Hence ko 5 k ( h ) and Lo = k ( h ) if and only if t ( g , h ) = 0 . Consider the number k(h) In=
c(gh)
[XI
Let a ( g , h ) be the angle determined by the positive directions of the axes of g and h. Then, by Theorem 1.7.4, a ( g , h )= 7r/2
J
t(g,h) = 0
0
a ( g ,h ) < 7r/2 I t(9, h ) = 1
0
a ( g , h )> 7r/2
t ( g , h )= -1
m = 1, m
> 1,
e m < 1.
I. 7. ORTHOGONAL DECOMPOSITIONS
51
Theorem 1.7.5 Let ( 9 ,h ) E H R be a pair with hyperbolic c = [ g , h ] . If the multipliers kl = k ( g ) and k4 = k ( c ) and the number
are known, then the pair ( 9 , h ) is determined up to conjugation. Proof. Since k1 and k4 determine ko, the number m determines then both kz = k ( h ) and c ( g , h ) . By Corollary 1.5.4 of Theorem 1.5.3, the multipliers k1, k2 and k4 determine the acute angle between the axes of g and h. On the other hand, ( ( g , h ) tells which one of the adjacent angles formed by the axes of g and h is acute. Hence t = ( r ( g ) ,r ( h ) ,a ( h ) ,a ( g ) ) is uniquely determined and the assertion follows.
Consider a set E = { g l , . . . ,g z P } of compact type. The first 6 p - 9 multipliers given in the proof of Lemma 1.6.3 determine the commutator cp = [gzp-l, g2pl.
Then by Theorem 1.7.5, the numbers k ’ ( g l p - l ) and m ( g 2 p - l , gZp) determine the pair ( g ~ ~ - l , g up 2 ~ t)o conjugation. The only freedom left is conjugation by hyperbolic transformations fixing the axis of c p . Geometrically, the “handle” determined by ( g z p - l , g z p ) is then “rotated around” the commutator c p . This rotation can be determined by one real parameter, so called twist parameter, as follows. Let L be a non-Euclidean line in U and let C ( L ) denote the group generated by the hyperbolic transformations : U + U with a x ( + ) = L . A family F of pairs ( g , h ) of hyperbolic transformations fixing U is L-invariant if the following conditions are satisfied:
+
0
If (g,h ) E 3- and $ E C ( L ) then $ ( g , h)$-’ = ( + o g o $ - l , +oho+-’)
E
3. If ( g i , h i ) E 3- and ( g 2 , h l ) E F ,then there exists a uniquely determined € C ( L ) for which (p2, h 2 ) = +(gl, h1)+-l.
+
Fix ( g o , ho) E 3 and suppose that 3 is L-invariant. The mapping (Y,
+
if
( 9 ,h ) = +(go, ho)+-’
(1.35)
is a bijection F -+ C ( L ) . Choose an orientation r ( L ) + a ( L ) on L . For (9,h ) = $(go, / L O ) $ - ’ , call the number (1.36)
52
CHAPTER I. MOBIUS TRANSFORMATIONS
the twist parameter of (g,h) E F with (g0,ho) as the origin. Hence, by (1.35), every (go,ho) E F defines a bijection (go,ho)) : 3 + R.
~ ( 0 ,
We can now choose the right element from an L-invariant family 3 as soon as we fix an element (go, ho) E F and give the twist parameter of the required element. Let c : U 4 U be a given hyperbolic transformation with r ( c ) < U ( C ) < 0. Consider all pairs (g,h) E ' ? ffor ~ which r(c> < r(g) < r ( h ) < a(g)
<
< 44
and
c = [g,hI. Then, by Theorem 1.7.5, the pairs (9, h) with given values of
k = k(h) and m = m(g,h) constitute an as(c)-invariant family T . Without loss of generality we may consider e.g. this family in the following theorems. To parametrize 3, it suffices to define the origin ( g o , h o ) of the twist parameter (1.36) in an invariant way. Let 9 2 be a given hyperbolic transformation with r(g2) = 0 and a(y2) = 00 (see Figure 1.16).
Theorem 1.7.6 Suppose that (g2,c) E Int P . Then (h,gZ) E P for a16 (g,h) E 3 and the junction (9,h ) I+ k ( h 92)
(1.37)
has its absolute minimum at a uiiiqzlely determined point (go, ho) E 3. Proof. By Lemma 1.5.2, (h,g-' o h-' o g) E Int 7. Then by Lemma 1.5.9, (g-'ohogoh-',h) = (c-',h) E I n t P and hence also (h,c-') E I n t P . Since (g2,c) E Int P,we have (h,g2) E Int P by Theorem 1.5.11. Fix ( g l , h l ) E 3. Then for any ( g , h ) E .F there exists a uniquely determined 9 E C ( u z ( c ) )such that
h = 9 0hi 09-l. Denote r = T(C)and a = a(c). Then by (1.29)
1.7. ORTHOGONAL DECOMPOSITlONS
53
Figure 1.16: The cross-ratio t associated with the pair ( h , g z ) depends on [:
<
If [ + 00 or + Of, then V ( r ( h 1 ) )+ Ot. Hence
< p ( a ( h 1 ) ) < a < 0 whereas v ( a ( h 1 ) )-
T
t(<)+ -00
as
<+
co or ( - +0 t .
Since, by the definition of the class P ,
we. have
I < ( [ ) = k ( h 0 92) + 00
(1.39)
as ( + 00 or ( + Ot. Moreover, K ( ( ) is a continuous function of ( > 0. Let (g’,h’) E F be the pair with the parameter <’> 0. Suppose that I < ( [ ) = I{(<’), i.e., k(h o 92) = k(h’ o 9 2 ) . Since k ( h ) = k(h’) and the pairs (h,g2) and (h‘,g2) are in P,they are conjugate (Lemma 1.4.1), i.e., there exists a hyperbolic transformation u fixing 0 and 00 such that (T
o
h o u-’ = h’.
(1.40)
On the other hand, since ( g , h ) and (g‘,h’) are in F , there exists C ( u z ( c ) ) ,such that 11, o h o +-’ = h’.
+E
CHAPTER I . MOBIUS TRANSFORMATIONS
54
Let, by (1.29),
'(*) = Denote
y1
= r ( h ) and
y2
(ak - r ) z - ar(k - 1 ) , k>O. ( k - 1). - k r a
+
= a(h). Then 4Yl) -Y1
@(Yd @(Y2)
-
4Y2)
-
Y2'
and we have by (1.24) k = T(Yl - 4
Y 2 -
4
4 Y l - T)(Y2 - r)'
(1.41)
Hence K ( t ) = k ( h o 92) attains a given value at most twice. Then by (1.39), the function K is convex and there exists a uniquely determined pair (go, ho) E T such that the function (1.37) has its absolute minimum at (go, ho). 0 The minimuin of I < ( [ ) = k ( h o 92) can be characterized as the unique value attained by X(t)once only. This in turn occurs if and only if k = 1 in (1.41). Hence Theorem 1.7.6 has the following Corollary 1.7.7 Under the hypoiheses of Theorem 1.7.6, the function (1.37) has its absolute rninimum at ( g o , / t o ) if and only if
- a)(a(ho)- a ) = 1. 0 a(r(h0) - rI(a(h0) r )
T(T(JL0)
-
By considering hyperbolic geometry in U ,Theorem 1.7.6 can be generalized as follows. Let du denote the hyperbolic distance in U defined by the line element Id4 ds = Im z ' Denote by du( L1, L2) the shortest distance between two non-Euclidean lines L1 and L2. Theorem 1.7.8 Let 3 be a n ax(c)-invariant family and g2 a hyperbolic transformation satisfying the normalization of Figure 1.16. Then the following holds:
there exists a unique (go, ho) E 3 such that d u ( a x ( h o ) ,4 for all ( 9 , It) E 3,
s 2 ) )
I d v ( a z ( h ) ,az(g2))
1.7. ORTHOGONAL DECOMPOSZTZONS
0
55
i f ( h O , g 2 ) E P, then the function ( h , g ) H b ( h o 92) has its absolute minimum in 3 at ( g o , ho).
Proof. For ( 9 , h ) E 3 and (g’, h‘) E F we have
if and only if there exists a hyperbolic u fixing 0 and 00 such that h’ = u o h o u-’, i.e., (1.40) holds. The existence of ( g 0 , h o ) follows now similarly as in the proof of Theorem 1.7.6 by replacing K ( [ ) by the distance d u ( a z ( h ) , a x ( g z ) ) .Also a t this riiinimum point we have b = 1 in (1.41). For ( g , h ) E F let t = t ( [ ) be defined by (1.38). Then by simple calculation, du(ax(lt),~ ~ ( 9 2=)log( ) 1 - 2t 2 J t z - t )
+
which, as a function of t , is decreasing for the values t < 0. Hence t ( [ ) attains its maximum t o = t([o) for the pLir ( g 0 , h o ) . Then t ( [ )5 t ( [ o ) and ( h , g 2 ) E P if (ho,sz>E The last assertion follows now by Theorem 1.7.6 and its Corollary 1.7.7. , P o
0
Corollary 1.7.9 For the fumily 3 in Theorem 1.7.8, choose (go, ho) minimizing d U ( 4 l t > , ax(g2)) as the origin of the twist parameter (1.36). If (hO,g2) E P , then the multiplier k(h o 92) is a convex function of the twist parameter 2
= 4 ( 9 ,I t ) , (90, ho))
and as a function of x , k ( h o 9 2 ) attains its minimum in R at x = 0. Proof. T h e convexity of the function x H k(hog2) follows from the convexity of the function (1.39). By Theorem 1.7.8, (go, ho) minimizes also k ( h o g 2 ) . 0
Suppose that (92, c ) E Int P . Then by Theorem 1.7.6 (ho,92) E P . For ( g , h ) E 3 define E(l1)
=
{
1 -1
if 4 - A 14, (go, 1x0)) L 0, if w((st, (go, ho)) < 0.
14,
Then we have, by the above corollary, the following result:
CHAPTER 1 . MOBIUS TRANSFORMATIONS
56
Theorem 1.7.10 The function
is a bijection 3 --f R.
In order to apply the preceding considerations to the parametrization of compact type groups, fix the genus p and consider sets E = (91,.. .,g z P } of compact type for which ( 9 2 , c p ) E Int P, Give first the following 6 p - 8 multipliers: 0
k ( g ; ) , i = 1 , . . .,2 p - 1,
0
k(g; 0 gl), i = 2 , . . . 2 p - 2,
0
k(ga o 9 2 ) , i = 3 , . .., 2 p - 2.
Then the set (91, . . . ,g2p-2} and hence also cp = [g2p-1, gzP]are determined. Consider all sets E of genus 1) with these 6 p - 8 parameters fixed. Let ~2~ = @ 2 o @ I be the orthogonal decomposition with respect to a z ( g z p - l ) . Then the numbers k ( c p ) and k(gZp-1) determine k(i92) and we have Ic(gZp) 2 k ( @ 2 ) . Hence, if we consider all possible pairs ( g , h ) = (g2p-1,g2p), there exists a minimum Lo = min k ( g z p ) . E
Fix the number
Then the az(c,)-invariant family F containing all pairs ( 9 , h ) = ( g 2 p - l , g 2 p ) with the given values of k ( g 2 p - ~ and ) g 2 p ) is determined. We may apply Theorem 1.7.6 to 3. Let k , = niin k(gzP o g 2 ) . E
Then, finally, the number
I determines the pair ( Y ~ ~ -92,). Fix a compact type set EO = { h l , . . .,hzp} of genus p . Denote 7p = [h2p-1,hZp]and suppose that (hz,yp) E Int P . Let Go be the principal-circle group generated by Eo. Define in J(G0) an equivalence relation by setting N
1.7. ORTHOGONAL DECOMPOSlTIONS
57
( j l ,G I ) ( j 2 , Gz) if j 2 o j,' : GI -+ G2 is induced by a Mobius transformation. Then every equivalence class [ j ,G] contains a unique representative (j,G) such that the set j ( & ) = { g l , . . .,g2p} with g; = j ( h ; ) ,i = 1 , . . .,2 p , is of compact type. Moreover ( g z , c p ) E Int P by Theorem 1.4.2. We have proved the following result: N
Theorem 1.7.11 T h e mapping J(Go)/ a
-
-+
R6P-6 defined by
z; = log k ( g i ) , i = 1 , . . . , 2 p - 1 ,
a ~ 2 ~ - 1 += ;
log k(g; o g l ) , i = 2 , . . ., 2 p - 2,
a ~ ~ ~ - -= 4 + log i
k ( g i o g2), i = 3 , . . ., 2 p - 2,
is injective. o We shall see later that the coordinates xi, i = 1,. . . ,Gp - 6 , have rather simple geometrical interpretations on a compact and orientable surface of genus p .
This Page Intentionally Left Blank
Chapter 2
Quasiconformal mappings 2.1
Introduction to Chapter 2
It is our ultimate goal to give parameters which define Riemann surfaces up to conformal isomorphisms. This is the famous moduli problem. The first solution was based on the theory of quasiconformal mappings. They give a way to deform one conformal type of Rieinann surfaces t o another conformal type. In this Chapter we will review the necessary part of the theory of quasiconformal mappings. Everything here belongs t o the classical foundations of this theory. Consequently, we will, in this Chapter, give only a quick review of quasiconformal mappings omitting all the proofs. We try to keep the presentations as readable as possible giving exact references for all the omitted proofs. Our main references for quasiconformal mappings are the monograph of Lars Ahlfors [6] and that of Olli Lelito and I<. I. Virtanen [59]. We will start with describing conformal invariants of certain simple plain domains. These invariants will then be used to define quasiconformal mappings and to study their properties. In the subsequent chapters quasiconformal mappings will be, in turn, applied to find conformal invariants which determine the isomorphism class of a Riemann surface.
2.2
Conformal invariants
Let Q be a simply connected closed set in the extended complex plane C . Assume that the boundary of Q is a Jordan curve. Let pl, p2, p3 and p4 be disjoint points of aQ whose cyclic order agrees with the positive orientation of aQ.
Definition 2.2.1 The doniuin Q together with the disjoint points p l , p2, and p4 on aQ is a quadrilateral Q = Q(pl,p2,~3,p4).For i = 1,2, let
p3
59
C H A P T E R 2. QUASICONFORMAL MAPPINGS
60
Q;(p',,pd,p$,pi) be quadrilaterals. A mapping f : Q1 + Q2 is Q homeomorphisms of quadrilaterals i f f is Q homeomorphic mapping of the closed set Q1 onto the closed set Q2 satisfying f ( p j ) = f ( p j ) for all j = 1,2,3,4. A homeomorphism of quadrilaterals Ql and 9 2 is an isomorphism if it is holomorphic in the interior of Q1. This is the standard definition, see e.g. [59, Page 151.
Lemma 2.2.1 Let Q ( p l , p ~ , p 3p4) , be a quadrilateral. The exists Q constant M = M ( Q ) 2 1 such that Q is isomorphic to the quadrilateral
N ( O , M , M + i , i ) , N = { z E C(O 5 R e z 5 M,O 5 I m t 5 i } . Proof. [59, Page 151.
Definition 2.2.2 The number A f of Lemma 2.2.1 is called the modulus of the quadrilateral Q . It is obvious that two quadrilaterals are isomorphic if and only if they have the same modulus. We conclude that the modulus is a conformal invariant that determines the isomorphism class of a quadrilateral. Ring domains form another class of domains that can be used t o define quasiconformal mappings.
Definition 2.2.3 A n open subsct B o f t h e extended complex plane which 1 1< 2) is called a ring domain. A is lioineoinorphic to the annulus {zll < 1 ring domain B is degenerate if one of its boundary components is a point. Otherwise B is non-degenerate. We also call ring domain a doubly connected domain. It can be proved with the help of harmonic measures that a ring domain B c (? can be mapped conformally onto an annulus { z )0 F r1 < 1.1 < ~2 5 oo}, see eg. [6, 6:5.1]. If B is non-degenerate, then 0 < T I < ~2 < 00. In this case the ratio T ~ / T Iis the same for all annuli conformally equivalent t o B.
Definition 2.2.4 The number M ( B ) = l o g -7.2 > 0 T1
is the modulus of a non-degenerate ring domain B which is conformally equivalent to I{. 0 < T I < (zz(< 7-2 < 0 0 ) . For a degenerate B , set M ( A ) = 00.
2.3. DEFlNlTlONS FOR QUASICONFORMAL MAPPINGS 0
0
0
2.3
61
The modulus of non-degenerate ring domains is always finite and positive. The modulus is monotonic: If B' C B is a ring domain separating the boundary components of B , then M ( B ' ) 5 M ( B ) . [59, 1.6.6.1. The modulus is a conformal invariant: I f f is a Mobius transformation, then M ( f ( B ) )= M ( B ) .
Definitions for quasiconformal mappings
It is interesting to observe that the modulus of a ring domain or that of a quadrilateral behave in the same way under deformations. T h e following result can be found for instance in the monograph of Lehto and Virtanen ([59, Theorem 1.7.2, page 391).
-
Lemma 2.3.1 Let f : A f ( A ) c C be a sense-preserving homeomorphism of a n open subset of the extended complex plane. The following conditions are equivalent: 0
The exists a constant Ii 2 1 such that f o r all quadrilaterals Q(P1,
p2 ,p 3 , p4)
in A we have
M ( li' f ( Q ) ) 5 M ( Q ) 5 KiM (f (Q)). 0
(2.1)
The exists a constant li' 2 1 such that for all ring domains B in A
Definition 2.3.1 Let A C C be an open set. Let Ii' 2 1. A sense preserving homeomorphism f : A --,f ( A ) is Zi-quasiconformal i f the equivalent conditions (2.1) and (2.2) are fulfilled for each quadrilateral i n A and f o r each ring domain in A . A mapping f is called quasiconformal if it is K-quasiconformal for some constant Zi, Zi’ 2 1. The smallest constant K for which a quasiconformal mupping f is K -quasiconformal is called the maximal dilatation of f . W e use ulso the notution I<( f ) for the mazimal dilatation of a quasiconforrnul mupping f. This definition for quasiconformal mappings is, in some sense, global. We can also define quasiconformality in terms of local conditions. Let A be an open subset of the complex plane C . Let f : A + f ( A ) c C be a sense-preserving homeomorphism.
CHAPTER 2. QUASICONFORMAL MAPPINGS
62
Definition 2.3.2 The circular distortion of the mapping f at a point z E A is the number
Lemma 2.3.2 A sense-preserving homeomorphism f : A --t f ( A ) c C is K-quasiconformal, I( 2 1, if the circular distortion H ( z ) of f is bounded in A and H ( z ) 5 Ir‘ almost everywhere in A . Proof. [59, Pages 177-1781. The following properties of quasiconformal mappings follow from the definition :
If f1 and f2 are quasiconformal, then also f = fi and I<(f) I IWl)Ir‘(fi).
of2
is quasiconformal
K(f) = K(f -1). If f is quasiconformal and g and h are orientation preserving Mobius transformations, then K(f) = K ( g o f o h).
Complex dilatation
2.4
Quasiconformal mappings that are regular enough can easily be characterized analytically. For a difleomorphism f : A + f ( A ) define the complex derivates setting 1 1 = -2( f z - i f y ) , = -(fz ify). 2 and f y denote the partial derivates o f f with respect to z and to y, i y , respectively. The derivate o f f in the direction a , 0 I a 5 27r,
af
Here
fz
z =z
is
+
af
+
2.4. COMPLEX DILATATION
63
Definition 2.4.1 The number
is the dilatation quotient of the mapping f at a point
t.
Lemma 2.4.1 A sense preserving diffeomorphism f : A quasiconformal, It7 1, i f and only if
>
4
f ( A ) is I(-
D,(")5 K for every t E A .
Proof. [60, Theorem 3.1, page 191.
Definition 2.4.2 A continuous function u : A + R is absolutely continuous on lines (ACL) i n a domain A c C if f o r each rectangle {x + iyla 5 2 5 b , c 5 y 5 d } c A , the function x u ( x + i y ) is of bounded variation on [a,b] for almost all y E [c,d ] and y H u(x + i y ) is of bounded variation on [c, d ] for almost all x E [ a ,b]. A complex valued function f is ACL in A i f its real and imaginary parts are ACL i n A .
-
Lemma 2.4.2 A quasiconformal mapping is absolutely continuous o n lines. Proof. [92]. It follows from standard theorems of real analysis that afunction f which is ACL in A has finite partial derivates fz and f y a.e. in A . We conclude that a quasiconformal mapping has finite partial derivates a.e.
Lemma 2.4.3 Quasiconformal mappings are differentiable almost everywhere. Proof. [33]. We conclude that a quasiconformal mapping f of a domain A is differentiable a. e. and satisfies the condition (2.4) a. e.
Theorem 2.4.4 A sense preserving homeomorphism f : A K-quasiconformal if and only i f the folloun'ng holds:
.--)
0
f i n ACL i n A .
0
max, l&f(z)l 5 Kinin, I&(z)I almost everywhere in A .
f ( A ) C C is
CHAPTER 2. QUASICONFORMAL MAPPlNGS
64
Proof. [60, Theorem 1.3.51. This result leads to the important notion of complex dilatation. Let f : A ---t f ( A ) be a K-quasiconformal mapping and z a point where f is differentiable and Jf(z) > 0. Since max,Idafl = lajl t lajl, rnin,la,fl = laflthe condition (2.4) is equivalent to
Iafl,
ri - 1
laf(Z>I
Since J f ( z ) = laf(z>l2quotient
I~ P f ( . ) l .
18j(z)12>
(2.5)
0, a f ( z ) # 0, and we can form the
Definition 2.4.3 The function p j which is defined almost everywhere by the formula (2.6) is the complex dilatation of the quasiconformal mapping
fa 0
Since f is continuous, pf is a Borel measurable function.
0
By (2.5), I p j ( z ) l 5 k =
< 1 almost everywhere.
Definition 2.4.4 A Bored measurable junction p : A
+
C which satisfies
is a Beltrami differential in the domain A. Let p be a Beltrami diflerential in A . The differential equation
is called a Beltrami equation. For a holomorphic mapping f , pf vanishes identically, and (2.7) reduces to the Cauchy-Riemann equation 8f = 0.
Definition 2.4.5 A n ACL junction f is said to have LP-derivates, i f the partial derivates o f f are locally in LP. Such a function f is called an LPsolution of (2.7) in a domuin A i f (2.7) holds almost everywhere in A . Theorem 2.4.5 A homeomorphism f : A + f ( A ) is I<-quasiconformal if and only i f f is an L2-solution of an equation 8f = p a f , where p satisfies condition (2.5) for almost all z .
2.4. COMPLEX DILATATlON
65
Proof. [60,Theorem 1.4.11. Let f and g be quasiconformal mappings of a domain A with complex dilatations p j and p g , respectively. Direct computation yields the transformation rule
which is valid for almost all t E A , and hence for almost all C E g ( A ) . The above transformation rule can be easily computed but it has deep consequences. Writing (i3g(t)/li3g(z)/)2 = a, p g ( z ) = b, p f ( z ) = 6 and pjog-l = w,the formula (2.8) becomes I.&)=-
a( - ab 1-&
The mapping [ H w is a Mobius-transformation mapping the unit disk onto itself. We conclude that the complex dilatation of pjos-l depends holomorphically on the complex dilatation p j . This fact plays a crucial role when defining the complex structure of a Teichmiiller space. The relationship between quasiconformal mappings and their Beltrami differentials or complex dilatations is very close. For our purposes they are simply two views of one object. That follows from the following important result.
Theorem 2.4.6 (Existence Theorem) Let p be a measurable function in a domain A. Assume that llpllm < 1. There exists a quasiconformal mapping of A whose complex dilatution agrees with p almost everywhere in A.
Proof. [58,p. 1361 or [59, p. 1911. This is one of the cornerstones of the classical theory of quasiconformal mappings. Assume that f and 9 are both p-quasiconformal mappings of the domain A. Observe that by (2.8) the complex dilatation of the mapping f o g-' is then identically 0, i.e., f o g-' is then a holomorphic homeomorphism. In this sense solutions to the Beltrami differential equation are also unique. This fact is sometimes referred to as the uniqueness of quasiconforma1 mappings and it will be used later. Actually even more is true: a quasiconformal mapping depends holomorphically on its complex dilatation. In order to clarify this statement, which is originally due to Lars V. Ahlfors and Lipman Bers ([2]) we need t o recall the concept of holomorphic maps between Banach spaces. Let E and F be complex Banach spaces and U c E an open set.
CHAPTER 2. QUASICONFORMAL MAPPINGS
66
Definition 2.4.6 A function f : U F has a derivative at a point xo E U if there exists a continuous complex linear mapping D f ( x 0 ) : E --f F such that --f
The mapping D f(x0) is the derivative off at XO. A function f : U + F is holomorphic in U i f it has derivative at each point of U . A holomorphic function is biholomorphic if it has a holomorphic inverse. Such a function is called a biholomorphic mapping. In the case E = C" and F = C" this notation agrees with the usual definition of holomorphic functions. Let F* denote the ( l i d of the Banach space F . The set F* consists of all continuous complex linear mappings F -+ C. The norm
makes F* a Banach space. Definition 2.4.7 A set A c F* is total i f the implication
Vy* E A : y*(x) = 0 j x = 0 holds. The following criterium (cf. [14]) is useful when having to check whether a mapping between Banach spaces is holomorphic.
Theorem 2.4.7 A function f : U F is holomorphic i f and only i f it satisfies one oj the jollowing conditions: ---f
0
0
+
For every x E U and e E E , the function z H f ( x ze) is a holomorphic function on an open neighborhood of the origin with values in F .
The functioiz f : U A c F' such that
--+
F is continuous and there exists a total subset
Vy* E A : y* o f : U
-, C
is holomorphic.
Using this characterization of holomorphic functions and an explicit singular integral expression for quasiconformal mappings one can prove the following result which has applications in Chapter 5 . A clear proof for the following can be easily derived from the proof of Theorem 5.1 in [60, page 2071.
2.4. COMPLEX DILATATION
67
Theorem 2.4.8 Let U be the upper half-plane and p a Beltmmi differential. Let f fi be the unique quasiconformal mapping whose complex dilatation agrees a. e. with p and whose eztension to the closure of U keeps 0, 1 and oo fixed. Then, for every z E U , the mapping p H f f i ( z ) is a holomorphic complex valued function on the unit ball of L".
This Page Intentionally Left Blank
Chapter 3
Geometry of Riemann surfaces 3.1
Introduction to Chapter 3
It is the aim of this book to show how the elementary considerations of Chapter 1 can be applied to Riemann surfaces and Teichmuller spaces. Many profound results concerning the famous moduli problem can be reduced t o the results of Chapter 1. This is surprising, because considerations of Chapter 1 were mostly based on multiplication of matrices and studying traces of matrices and words of matrices. In order to be able t o see how this is done we have to review some results of the topology of surfaces, Riernann surfaces and the uniformization of Riemann surfaces. Much of the material of this Chapter will be presented without proofs. We will, however, give references to proofs a t all places where complete reasoning is omitted. Our main references t o topology of surfaces are the monographs of Edwin Spanier ([91]) and Lars Ahlfors and Leo Sario ([3]). Even though we assume that the basic results are known we will here review everything that is necessary for our considerations.
3.2
Riemann and Klein surfaces
A connected topological Hausdorff space C is a surjace with boundary if the following condition is satisfied: every point p E C has an open neighborhood U which is homeomorphic t o a n open set in the closed upper half plane I.{ Im z 2 0). A homeomorphism z : U -+ z ( U ) is called a local variable at the point p E U. The pair ( U , z ) is called a coordinate chart. Points p E C for which all the local charts ( U , z ) , p E U , satisfy z ( p ) E R 69
70
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
are called boundary points of C. Recall that, by the definition, z ( U ) c (21 I m z 2 0) for all local charts (U,z). Boundary points of C form the boundary dC of C. By a surface we usually mean a surface with an empty boundary. Surfaces that are allowed t o have boundary are referred to as surfaces with boundary. In the sequel we have to deal with homeomorphisms of open sets of the closed upper half-plane. Let f : A + f ( A ) be such an homeomorphism. We say that it is holornorphic or analytic if it is holomorphic in the usual sense in A n {zI I m z > 0). A homeomorphism f : A + f ( A ) is called dianalytic if either f itself or the complex conjugate o f f is holomorphic in each component of the set A . Let z : U + z ( U ) and w : V -+ w(V) be two local variables such that U n V # 8. Then we may form the mapping z o w-l : w ( V n U ) + z ( V n U ) . This mapping is called the coordinate transition function.
Definition 3.2.1 A collection U = {(Ui,zi)liE I } of coordinate charts of C is an atlas of the surface C i f C = UiCrU;. A n atlas U is: orientable if each coordinate transition junction zi o zJT1is an orientation preserving homeoinorphism. dianalytic if all the coordinate transition functions are dianalytic homeom o rphisms. complex analytic i f all the coordinate transition functions are holomorphic homeomorpliisms. Two complex analytic atlases U and V are called equivalent if U U V is a complex atlas as well. An equivalence relation is introduced in the same manner for the other types of atlases. An equivalence class of complex atlases is called a complez structure of the surface C. Dianalytic, and orientable structures are defined in the same way as equivalence classes of the respective structures. A surface C which has an orientable structure is called orientable. An orientable structure of an orientable surface determines an orientation.
Definition 3.2.2 A Riemann surface is a topological surface C together with a complex structure X . A Klcin surface is a topological surface, possibly with boundary, C together with a dianalytic structure Y. Observe that Riemann surfaces, as defined above, do not have boundary points and that each Riemann surface automatically is a Klein surface as well. A Klein surface ( C , X ) that cannot be made into a Riemann surface
3.3. ELEMENTARY SURFACES
71
is called non-classical while orientable Klein surfaces with empty boundary are called classical. A classical Klein surface always carries two Riemann surface structures which are complex conjugates, or mirror images, of each other. It is well known that every surface with boundary can be made into a Klein surface, i.e., every such surface carries dianalytic structures. It is also well known that every orientable surface can be made into a Riemann surface. These results follow from the topological fact that every surface with or without boundary can be represented as a branched covering of the Riemann sphere or the unit disk (for a proof in the case of compact surfaces see e.g. [8, Theorem 1.7.2, page 491). We will not prove this result here because we do not use it anywhere. The problem that we are concerned about is t o parametrize the set of all analytic or dianalytic structures of a given surface in some reasonable way. This is also the famous moduli problem.
3.3
Elementary surfaces
Simpliest compact topological surface is the sphere S2 in R3
s2= ((2,y, z ) I x 2 t y2 t t2= 1). Identifying the antipodal points (z,y, z ) and (-z, -9, -t) on the sphere S 2 one obtains the real projective plane P'(R). This surface is not anymore orientable in the sense that it has only one side. It is not possible to embedd the real projective plane in R3. The torus T is the quotient surface
T = C / ( z I-+ z
+ 1, z
H
z
+ i).
Here ( z H z+ 1, t H z+ i) is the group generated by the elements z and J H z t i. Let R be the strip
H
z+ 1
The torus can be obtained from a rectangle identifying its opposite sides. If we identify only one pair of opposite sides we get an annulus
A = R/(zH z
-+ 1).
The identification of a pair of opposite sides can also be done changing the orientation. T h a t is achieved by the mapping z I+ Re z 1 (1 - Im z)i. The quotient surface
+ +
M = R / ( z H Re z
+ 1 t (1 - Im z ) i )
72
CHAPTER 3. GEOMETRY OF RIEMANN SURJ-ACES
Figure 3.1: The sphere, the torus and the real projective plane. The figure shows the real projective plane cut open along an arc in such a way that the cutting yields a half-sphere. The straight lines indicate how antipodal boundary points have to be identified in order to get a 'real' real projective plane. is the well known MGbius strip. It is the only one-sided, i.e., a nonorientable, surface that can be embedded in an euclidean 3-space. Figure 3.2 shows the Mobius strip in the upper left hand corner. The Klein bottle is another famous non-orientable surface. The usual way to picture the Klein bottle is to consider first an ordinary bottle from which a small open disk is deleted from the bottom. This is actually an annulus. To get the Klein bottle, identify the two boundary components of the bottle (i.e. the annulus) we started with in such a way that the orientation gets reversed in the process. In this way one gets a one-sided bottle. Another way to picture the Klein bottle is shown in figures 3.2, 3.3 and 3.4. All these illustrations are due to Ari Lehtonen. In these figures the Klein bottle is formed by taking two copies of the Mobius strip and identifying the boundary points. Figure 3.2 illustrates this. The resulting surface is some kind of a twisted product of a figure-8 curve and the unit circle. Figure 3.3 illustrates this.
3.4
Topological classification of surfaces
Section 3.3 gives a rather concrete picture about some elementary nonorientable surfaces. We can make this a little bit more precise by considering curves on surfaces. A curve (Y on C is the image of the closed unit interval I = [0,13 under a continuous mapping (Y : I + C. We often use the same notation (Y for a mapping I + C and for its image in C. The points ( ~ ( 0 ) and ( ~ ( 1are ) the end-points of a. Observe that the orientation of the unit
3.4. TOPOLOGY O F SURFACES
73
Figure 3.2: Simpliest non-orient able surface with boundary components is the famous Mobius strip. It can be embedded in a 3-space. Gluing two Mobius strips together along the boundary curves yields the Klein bottle, which cannot be embedded into a 3-space. This illustration shows first the Mobius strip which is then gradually enlarged t o a projection of the Klein bottle in a 3-space. The projection necessarily cuts itself. We thank Ari Lehtonen for this picture.
74
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
Figure 3.3: The Klein bottle can be viewed as a twisted product of afigure-8 curve and the unit circle.
3.4. TOPOLOGY OF SURFACES
Figure 3.4: The Klein Bottle.
75
76
C H A P T E R 3. G E O M E T R Y O F RIEMANN SURFACES
Figure 3.5: A surface of genus g is a sphere with g handles.
interval [O,1] induces an orientation for each curve a : [ O , l ] + C. A curve a is closed if its end-points agree. A closed curve a is called simple if the mapping a is injective when restricted to the half-open interval [0,1[. A simple closed curve cr is two-sided if there exists an open and connected set U such that a c U and U \ a has two components. A curve a is one-sided if it is not two sided. Another characterization for orientable surfaces can be obtained by means of simple closed curves: A surface C is orientable if and only if every simple closed curve in (the interior of) C is two-sided. We will not prove this result here and we do not need it in our applications. The Euler cliaructeristic x(C) of a compact surface C is defined (for more details see e.g. (91, p. 113 and p. 1721 or [3]) in terms of finite triangulations of C. If n j is the number of j-faces of a finite triangulation of C, j = 0,1,2, then x ( C ) = no - n1+ n2. For an orientable compact surfaces C, the Euler characteristic is an even number and the number g = g ( C ) = 1 - x ( C ) / 2 is called the genus of the orient able surface C. The genus g of an orientable surface C is always non-negative. A compact surface of genus 0 is homeomorphic to the Riemann sphere C. A compact orientable surface of genus g , g > 0, can be thought of as a sphere with g handles.
3.4. TOPOLOGY OF SURFACES
77
Let now C be a surface, orientable or not. Let p E C. We proceed and define next the orientable covering C" of the surface C as follows. An atlas U = { ( U i , zi)li E I} of C is maximal if the following condition is satisfied: Let V be an atlas of C such that U U V is also an atlas of C. Then U
c V.
Assume now that U = {(Ui, z;)li E I} is a maximal atlas of C . Form first the disjoint union
Let ( U i , z i ) and ( U j , z j ) be twocharts such that U i n U j # 8. Let p E U i n U j . Being a disjoint union the set S has two points which both correspond to the point p E C, namely the point p E Ui and the same point p E U j . To make a distinction between these points, call the latter one p'. Next we identify the points p and p' if the corresponding coordinate transition function zi o zlT' is orientable. This gives us the set C". We still have to define a topology for the set C". That is done via the natural projection K : C" + C. A topology for C" is defined requiring a : C" -+ C be locally homeomorphic. Then C" is clearly an orientable surface. It is connected if and only if C is non-orientable. For an orientable C, Co has two components which are both homeomorphic t o C. If dC # 0, then C" has two points lying over each boundary point of C. Identifying these two points gives us a surface Cc which is called the complex double of the surface C. The covering R : C" + C induces a mapping a : C" -+ C which is a ramified double covering of C. It is a local homeomorphism a t all points p E C" for which ~ ( p #) dC. At points lying over the boundary of C, the projection is a folding similar to the mapping z i y H 3: ilyl at the real axis. For more details about this mapping see [8, 1.61. In this way we form the complex double C" of a surface with boundary C. If C is orientable and dC = 8, then C" has two components which are both homeomorphic to C. For all other surfaces C, C" is a connected orientable surface without boundary. Observe that the covering group of the branched covering 7r : C" + C is generated by an orientation reversing involution (T : C" + C". (An involution is a mapping whose square is the identity.) Also C = C C / ( a ) ,where (a)is the group generated by (T.Here CC/(a) is the quotient surface obtained by identifying p with a ( p ) for all p E C". Above we defined the genus of a classical compact surface. The genus, or, more precisely, the arithmetic genus of a non-classical compact surface C is defined as the genus of the complex double Cc of C.
+
+
C H A P T E R 3. G E O M E T R Y OF RIEMANN SURFACES
78
When speaking of the genus of non-classical surfaces we always mean this arithmetic genus. Observe that in some other text books the genus of a non-classical surface has another meaning. Since the Euler characteristic of a circle vanishes, we have x ( C " ) = 2 x(C) for all non-classical compact surfaces C. Therefore we conclude that for nonclassical compact surfaces x( C) = 1 - g . Recall that for classical surfaces C, x( C) = 2 - 2g. Compact topological surfaces are classified topologically by the following parameters: 0
the genus g = g ( C ) of C,
0
the number n = n ( C ) of components of a C ,
0
the index of orientability k = k ( C ) which is defined setting k = 0 for orientable surfaces C and k = 1 for non-orientable surfaces C.
It is clear that the above parameters g , n and k are topological invariants in the sense that for surfaces, that are homeomorphic to each other, the genus, the number of boundary components and the index of orientability agree. These parameters are also related to each other as described in the following theorem [96]. Theorem 3.4.1 The index of orientability k and the number n of boundary components of a compact genus g surface C with boundary components
satisfy: I f k = 0 then n = g + 1 (mod 2) and n 0
> 0.
If k = 1 then 0 5 n 5 g .
These are the only restrictions und all possible configurations of g , n and
k satisfying these conditions appear as invariants of some compact genus g surface with boundary components. Corollary 3.4.2 There are
39+4
l,-l
topologically diflerent non-classical compact genus g surfaces with boundary components. These are classical results of Weichhold. They can also be found in the works of Klein ([45],[47], [49]). We will not prove this result here. In Section 3.7 we will, however, construct a partial proof for Theorem 3.4.1. In that
3.4. TOPOLOGY O F SURFACES
79
section we show a way to construct all the surfaces of Theorem 3.4.1. What remains not shown in this monograph is that there are no other surfaces. That can be found in the works referred above. Observe that classifying non-classical topological compact genus g surfaces is the same thing as classifying all orientation reversing involutions u of a classical compact genus g surface. This follows from the above constructions. The complex double Cc of a non-classical genus g surface C is a branched covering of C and the cover group is generated by a single orientation reversing involution CT : Cc + C". Then C = C'/((T). Conversely, given a classical compact surface C' of genus g and an orientation reversing involution u : C' + C', then C'/(o) is a compact nonclassical surface of genus g .
Definition 3.4.1 A symmetric surface ( C , a ) is a classical surface C together with an Orientation reversing involution u : C -+ C . The involution u is the symmetry of the symmetric surface C. For a symmetry u : C + C define T L ( ( T ) as the number of the components of the fixed-point set C, of u . Define also k ( a ) setting k ( n ) = 2 - number of components of C \ C,.
It is immediate that the invariants n(u)and k(cr) are simply the corresponding invariants n and k of the quotient surface C / ( a ) . We say that two symmetries (T and T of a topological surface C are conjugate to each other if there exists a homeomorphism f : C + C such that u o f = f o T . This is equivalent to the condition that the surfaces C / ( u ) and C / ( T ) are homeomorphic to each other. Corollary 3.4.2 implies then that the number of different conjugacy classes of symmetries of a classical genus g surface is given by formula (3.1). For a later application it is useful t o be able to have a concrete understanding of the topology of a compact surface. To that end we will now describe a n explicit way of building a compact surface starting with certain elementary surfaces. We use the three elementary surfaces, the sphere S 2 , the torus T and the real projective plane P'(R), to construct concrete models of more complicated surfaces. Let p and k be non-negative integers, and let S;+k denote the complement of the union of n+ k open disks on S2whose closures are disjoint. Let TI denote the complement of an open disk on T . Likewise P1(R)l is the complement of an open disk on P'(R). The Euler characteristics are:
80
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
Let A and B be two compact subsurfaces with boundary of a topological surface. The Euler characteristics satisfy
Build a surface E; by taking s i + k and gluing to it p copies of the surface TI to it along the boundary components and k copies of the surface P1(R)l also along the boundary components. In this way one obtains a compact surface CP, without boundary components. Using (3.2) and the fact that the Euler characteristic of a circle vanishes we compute that
x ( q ) = 2 - p - k t px(T1) = 2 - 2 p - k. In this way one can build all compact surfaces without boundary components starting from the sphere, the torus and the real projective plane. We say that the surface C! is the direct sum of the sphere, p torii and k real projective planes. These real projective planes are also called cross caps of the surface CP,. Any compact surface with boundary components can then be obtained from a surface of type CP, by deleting a suitable number of open disks with disjoint closures. Let CP,', be a compact surface with p handles (i.e. torii), k cross caps and n boundary components. Using the above computation we easily get the formula x(CP,'") = 2 - 2 p - k - n for the Euler characteristic of the surface
3.5
Xi',.
Discrete groups of Mobius transformations
A topologicul group G is a group G together with a topology for which the inverse G -, G, g H g-' and the group operation G x G -+ G are continuous mappings. Let G now be a group of Mobius-transformations. Elements of G are of the form
3.5. DISCRETE GROUPS
+
81
+
+
+ ... Figure 3.6: Any compact topological surface can be built combining a finite number of simple structures. This figure shows a few first steps of such a construction. The holes shown in the figure may be boundary components of the resulting surface or may be used to add cross caps or may be used t o add more structure. We thank Ari Lehtonen for this illustration.
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
82
We can define a topology on G by saying that a sequence (gk, k = 1 , 2 , . . .) converges to a,z b, gm(z) = ccoz t d , if and only if we may choose representations of the type (3.3) for the elements gk in such a way that ak --* a m , b k + b,, ck -+ c , and dk + d , as k + 00. This is the usual definition. Together with this topology G is a topological group. Recall that a topological space is called discrete if all of its subsets are open. Likewise we say that a topological group G is discrete if all of its subsets are open. Observe especially that for a discrete topological group all subsets consisting of one point only are open. In the applications of the methods presented in Chapter 1, discrete groups of MSbius transformations play an important role. A related concept to discreteness is discontinuity. We say that a group G whose elements are Mobius transformations acts discontinuously at a point x E C if the following holds:
+
w
The stabilizer of G at x, G, = { g E G I g(2) =
XI
is finite. w
There is an open set U c C, x E U , such that g ( U ) = U for all g E G, and g ( U ) n U = 0 for all other elements of G.
The set of points where G acts discontinuously is called the set of discontinuity, or regular set, and is usually denoted by R = R(G). It follows from the definition that 52 is an open G-invariant subset of the extended complex plane. A group of Mobius transforinations that acts discontinuously in some domain D is sometimes said t o be properly discontinuous. Definition 3.5.1 A group G of Mobius transformations is a Kleinian group ifR(G) # 0. L e m m a 3.5.1 A li'leinian group is either finite or countable. Proof, Choose a point Then
tE
R(G) such that the stabilizer of z , G,, is trivial.
G(z.1 = {dz) 19 E GI is a discrete set. Therefore G(z) is either finite or countable. Observe finally, that the cardinality of the set G ( z ) is the same as the cardinality of the group G.
3.5. DISCRETE GROUPS
a3
Definition 3.5.2 A Kleinian group G is a Fuchsian group if the following holds: there is a disk (or a half-plane) D of the extended complex plane C such that each element of the group G maps D onto itself and D c Q(G). The following result is immediate by definitions:
Lemma 3.5.2 Every Kleinian group is discrete. The converse is not true. The Picard group
P=(zH-
az + b I ad cz d
+
-
bc = 1 and a , b, c, d E Z [ i ] }
is clearly discrete but not discontinuous because it, can be shown that for any z E C, the set { g ( z ) I g E P } is dense in C.
Theorem 3.5.3 Let G be a group of Mobius transformations mapping the unit disk D onto itself. Then G is discontinuous if and only i f it is discrete. Proof. As we have already observed, a discontinuous group is clearly also discrete. It suffices, therefore, to show that a discrete group of Mobius transformations mapping the unit disk onto itself is also discontinuous. To prove this assume that the group G is not discontinuous at some point zo E D . This means that we can find infinite sequences 2 1 , z2,. . . E D and g 1 , g 2 , . . . E G such that z, -+ t o as n --+ 00 and gn(zn) = zo for each n. Set now and
C, = A,+1
o
g i l l o gn o A;’,
n = 1 , 2 , . . ..
Since C,(O) = 0, we conclude by Schwarz’s lemma that
C n ( t )= A ~ z ,
IXnI = 1.
Thus, by passing to a subsequence if necessary, we may assume that A, A0 as n --+ 00. This means that the sequence C, converges to Co as n 4 00. The points z, are assumed to be distinct. Therefore also the elements g , of the group G are distinct. The mapping h, = g;:l o gn maps z, onto z,+1 for each n. Assume that infinitely many of the mappings h, agree. Then we may as well suppose that h, = h for all n. We conclude that --f
20
= lim z, = lini h(z,) n+m
n+m
(3.4)
is a fixed point of the mapping h, which is, therefore, an elliptic element of the group G. But since h is elliptic, (3.4) can happen if and only if z, = zo
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
84
for large enough values of n . But this is not possible, since we assumed that all the points z, are distinct. This implies that the mappings h, = g;il ogn are distinct elements of the group G. On the other hand, the above considerations imply that
h, = A,+I
o
C,
o
A;'
-+
A;'
o Coo A0 as n + 00.
This is not possible since the group G is discrete. Observe that in the above proof the contradiction was derived from the assumption that there is one point 20 E D at which the group G does not act discontinuously. Above proof actually implies the following stronger statement: Theorem 3.5.4 Assume that the Mobius group G leaves the unit disk invariant. The following conditions are equivalent:
1. D
c R(G).
2. D fl R(G)
# 0.
3. G is discrete.
In this monograph we are concerned with Mobius groups that act either in the unit disk or in the upper half-plane. By Theorem 3.5.3 discontinuity and discreteness are equivalent properties for such groups. Let G be a discrete Mobius group that acts in the upper half-plane U. Assume that the stabilizer of z E U in G is trivial. Form the set
D,(G) = (2’ E U I d ( z ' , z ) < d ( g ( z ' ) , z ) V g E G , g
#
l}.
It is clearly an open set and it has the following properties: 1. No two points of D,(G) are equivalent under the action of the group
2. For every point w E U there exists an gw E G such that gw(w) E
LUG). 3. The relative boundary of D,(G) in U consists of piecewise analytic arcs.
4. For every arc a c dD,(G) t,here is an arc a' c aD,(G) and an element g E G such that g ( a ) = a'.
3.6. UNIFORMIZATION
85
We will not show here that D,(G) satisfies these properties. A detailed proof can be found in the monograph of Alan F. Beardon [lo, §9.4.,pp. 226 - 2341.
Definition 3.5.3 By a fundamental domain a Fuchsian group G acting in the upper half-plane U we mean an open subset D(G) of U satisfying the above conditions 1 - 4. The above defined fundamental domain D,(G), for a point I E U that is not a fixed-point of a non-identity element of G, is called the Dirichlet or the Poincar6 polygon for G.
3.6
Uniformization
For any surface C we may form the universal covering surface 2 which is simply connected and admits a projection A : 2 -+ C that is a local homeomorphism. Furthermore each point p E C has a neighborhood W, such the restriction of the projection K to each component of .-'(Up) is a homeomorphism between the component and U p . Homeomorphic self-mappings g of % satisfying A o g = A form the cover group G of the universal covering A : 9 + C. Since A is a local homeomorphism, the group G acts discontinuously on 2. The action is also free in the sense that no non-identity element of G has fixed-points in 2. The cover group G of the universal covering of C has the property that if ~ ( p=) n ( q ) , for p , q E 9, then there exists an g E G such that g ( p ) = q . It follows that C = g/G. This is, of course, quite standard. More details concerning the universal cover can be found, for instance, in [3]. Let X be a dianalytic structure of the surface C. Then, by requiring the mapping A be locally analytic, we may lift the dianalytic structure of C t o a dianalytic structure 2 to 2. Next observe that, since 2 is simply connected, it is orientable. Therefore the dianalytic structure X of % is induced by a some complex structure Y . Hence we may suppose that 2 is a complex structure such that A : (2,k)+ (C, X ) is dianalytic. There are actually two possible complex structures d satisfying this condition. They are complex conjugates of each other. We conclude that any Klein surface ( C , X ) has a Riemann surface as its universal covering surface. From the equation A o g = A and from the fact that x : (2,z)-+ (C, X ) is dianalytic and a local homeomorphism, it follows that each element g of the cover group G is a dianalytic self mapping of ( 2 , d ) . The following result is the famous Rieinann mapping theorem:
C H A P T E R 3. G E O M E T R Y OF RIEMANN SURFACES
86
Theorem 3.6.1 A simply connected Riemann surface without boundary is either the extended complex plane, the finite complex plane or the upper half plane U. We will not prove this result here. A proof can be found, for instance, in the monograph of Farkas and Kra [29, Theorem IV.4.4, p. 1821. By this theorem we may suppose that, for any Klein surface ( C , X ) , the interior of the universal covering is one of the standard Riemann surfaces of Theorem 3.6.1. Then, by the preceding observation, we conclude that elements of a cover group G corresponding t o a Klein surface ( C , X ) are all Mobius transformations. If the Klein surface ( C , X ) is not orientable, then the group G necessarily contains orientation reversing Mobius transformations. Analyzing all possible groups that act properly discontinuously on the Riemann sphere or on the finite complex plane we conclude that:
(E,z)
0
(%,%) is the Riemann sphere if and only if ( C , X ) is either the Riemann sphere itself or the real projective plane. In this case the Euler characteristic of C is positive.
0
(c,%)
is the finite complex plane if and only if ( C , X ) is one of the following surfaces: -
finite complex plane,
-
torus,
- infinite cylinder, -
Klein bottle.
In this case the Euler characteristic of C vanishes. If the Euler characteristic of C is negative, then the universal covering ( C , X ) is always the upper half-plane together with certain intervals on the real axis. These intervals correspond t o the boundary of the Klein surface (C, X). Then the upper half-plane itself is the universal covering of the interior of the Klein surface (C, X ) . It is sometimes technically easier to consider the interior of a surface instead of the whole surface with boundary. By abuse of language, we may later speak of the upper halfplane as the universal covering of a Klein surface which may have boundary components. Let Q E C be a point and a , p closed curves on C with end-points at Q. We say that a and p are homotopic if there exists a continuous mapping h : [0,1] x [0,1] + C such that h ( 0 , s ) = h(1,t) = Q and h(s,O) = ( ~ ( s ) ,
( 2 , R ) of
3.6. UNIFORMIZATION
87
h ( t, 1) = P ( t ) , for all s,t E [0,1]. We use the notation (Y x p to indicate that a and p are homotopic to each other. It is obvious that x is a equivalence relation in the set of closed curves with end-points a t Q. The corresponding set of equivalence classes, or homotopy classes, of closed curves at Q is denoted by nl(Z,Q). If a and p are closed curves as above, then their product ap is defined setting
It is rather straightforward to verify that this multiplication determines a multiplication in r l ( C , Q ) and that nI(C,Q) is then a group. It is called the fundamental group or the first homotopy group of the surface C a t the base point Q. The definition of the fundamental group r l ( C , Q) depends on the choice of the base-point Q. The choice of this base-point is, however, irrelevant. Standard arguments show that if Q’ is another point of C then the groups rl(E,Q) and .rrl(C,Q’) are isomorphic to each other. This isomorphism can be constructed in the following way. Let first y be a curve such that y(0) = Q and y(1) = Q’. Then define
This is a well defined mapping and an isomorphism. The isomorphism (3.5) depends, of course, on the choice of the connecting curve y. An other choice of y changes the isomorphism (3.5) by an inner automorphism of r l ( Z , Q ‘ ) . Let G be the covering group of the universal cover of the surface C. There is an almost canonical morphism
i : r l ( C , Q ) + G,
(3.6)
which is defined in the following way. Choose first a point Q E U (or E C or E C)lying over the point Q E C. Every closed curve 7 with end points at Q can be lifted to the universal covering space U (or C or C) of ( C , X ) . The lifting becomes unique when we require that its starting point is the be the end-point of this lifting. Then previously fixed point 0. Let also Q I is a point over Q and hence there is an element gr of G such that gy(Q) = The element gr defined by this condition is unique because non-identity elements the group G do not have fixed-points in D.
91
01.
Lemma 3.6.2 The Mobius transformation gr E G depends only on the homotopy class of 7 .
88
C H A P T E R 3. G E O M E T R Y O F RIEMANN SURFACES
Proof. This is a standard result in topology and holds even in a more general setting. The result follows from the ‘homotopy lifting property’ of the universal cover and the discontinuity of the action of the cover group G. For a proof we refer to [91, Corollary 8 on page 881. By Lemma 3.6.2 [7]+ gr is a well-defined mapping K I ( C )4 G. The following result gives us the inverse of this morphism and thus proves that it is actually an isomorphism bet,ween n l ( C , Q ) and G.
Lemma 3.6.3 Assume that (C, X ) is a Klein surface such that the universal cover of the interior of ( C , X ) is the unit disk D with the cover group G. Let a be a closed curve representing a point of nl(C,Q). Let ga = i ( [ a ] ) be the element fo the group G which corresponds to [a]E r l ( X , Q ) . Then each curve in D with end-points z and ga(z), z E D ,projects to a closed curve on C that is homotopic to the curve a. Proof. This is also quite standard and follows from rather general topological arguments. To prove the result we have to construct a homotopy between the projected curve and the original curve a. That can be done using hyperbolic geometry. Choose now a point z E D and a lifting of the curve a to a curve ti in D. Then 5 is a continuous mapping I -+ D satisfying a = K o 6 , where K : D + C is the projection. Let p : I + D be a curve in D such that p(0) = z and p( 1) = ga(.z). We form first a continuous mapping F : I x I + D in the following way. Let ( t , s ) E I x I . Define F ( t , s ) as the point on the hyperbolic geodesic between p ( t ) and 5 ( t ) which divides that geodesic in the ratio s : (1 s). Then clearly F ( t , O ) = p(t), F ( t , 1 ) = & ( t ) for all t E I . We have, furthermore ga(F(O,s) = F(1,s) for all s E I. This implies that K o F : I x I + C is a homotopy between the closed curves a and K o p proving the lemma. By the above result we conclude that r l ( C , Q ) -+ G, [a]H ga, is an isomorphism. It depends on the choice of the point Q E D lying over the base-point Q. Another choice of Q changes the corresponding isomorphism by an inner automorphism of G.
Definition 3.6.1 We say that the transformation ga E G of Lemma 3.6.3 covers the (homotopy class of the) curve a. Next we recall a result (cf. e.g. [91, statement 12 on page 1491) describing the fundamental group of a surface. Assume that C is compact surface with n boundary components, p handles and k cross-caps.
3.6. UNIFORMIZATION
89
Theorem 3.6.4 The fundamental group xl(C,Q) of the surface C is genemted b y the elements a l , 01,.. .,a,, Pp (which correspond to the handles of C ) , 71, .. .,-yn (which correspond to the boundary components) and 61, . . .,6 k (which correspond to cross-caps) satisfying the relation k
V
n
[c.j,pj] is the commutator of aj and
Recall that, in the above theorem, Pj-
Now let X be a dianalytic structure on C and assume that (the interior of) the Klein surface (C, X ) is DIG for a reflection group G. The group G is isomorphic to xl(C,Q). Let i : x l ( X , Q ) + G be an isomorphism and let gj = i(aj),hj = i(,f?j),d j = i(yj) and sj = i ( S j ) be the elements of G corresponding to the generators of x l ( X , Q). Then the set
= { g i , h l , . . .,gp,hp,dl,...,dn,51,...,sk} generates G and satisfies k
1)
nrgj,hj]
l-I
j=1
i=l
n
dj
s;
= 1.
1=1
Definition 3.6.2 Generators gj, h j , d; and s1 of the group G satisfying the relation (3.8) are called the standard generators for G. Observe that if X is a compact classical Riemann surface of genus p , then there are no generators of type d j or si. The standard generators for such a group are Mobius transformations 91, h l , . . ., g,, h, satisfying the single relation P
n r g j ,hj] = 1.
(3.9)
j= 1
This is also the most complicated case since, froin the relation (3.9), it is not possible t o solve any one of the generators in terms of the other generators. But if n > 0, then the group G is actually freely generated, since, in this case, one can solve one of the elements d j by the relation (3.8). If 7t = 0 but k > 0, then we have minor technicalities to take care of. In this case we can express, by the relation (3.8), one of the Mobius transformations sj” in terms of the other generators. By the construction, sj’s are now orientation reversing Mobius transformations mapping the unit disk onto itself. Such a Mobius transformation is a glide reflection and its square is a hyperbolic Mobius transformation.
90
C H A P T E R 3. GEOMETRY OF RIEMANN SURFACES
Recall then (cf. considerations on page 16) that the hyperbolic Mobius transformation s! alone determines the glide reflection s, uniquely. Therefore, even if the group G in this case is not freely generated, we know everything about the generator s1 when all the other generators are given. The classical case of compact and oriented Riemann surfaces remains the most complicated one. Let X = ( C , X ) and Y = ( C , Y )be Klein surfaces. We need t o consider continuous mappings between X and Y . Assume that X = DIG and Y = DIG', where G and G' are Fuchsian groups. Let f : X --f Y be a continuous mapping. It can then be lifted to a continuous mapping F : D -+ D satisfying For'= f or (3.10) where x : D + X and x' : D -+ Y are the projections. If F is one such lifting, then also g'o F 0 9 , g E G, g' E GI, is a lifting o f f , i.e., a continuous mapping satisfying (3.10). All continuous liftings of a continuous mapping f are obtained from one lifting in this manner. The equation (3.10) implies to the following observation:
For each z E D and for each g E G there exists an g: E G' such that (3.11)
Lemma 3.6.5 The Mobius trarisformation gc in equation (3.11) does not depend on the point z E D . Proof. Let to and z1 be two points of D and let a : I -+ D be a curve such that a ( 0 ) = 20 and a(1) = 21. Denote a ( t ) = zt. Then we may define the element g:, for each t E I by the equation (3.11). Recall that since the group G' acts freely in D the element g:, is uniquely defined by (3.11). It suffices to show that g;, = gi,. To that end, let I' = {t E I I g i , = gi,. Clearly I' # 0, since 0 E Z’. By the discontinuity of the group G’ we then conclude that both I' and its complement are open in I . This implies then that I' = I proving the lemma. The above result follows also from the discreteness of the group G. To see this, consider the above defined elements gzt E G. They give a continuous mapping I t G, t I+ g z r . But since G is discrete and I connected, such a continuous mapping is necessarily constant. The difficulty in this reasoning is to show the continuity of the mapping t H gtt. By Lemma 3.6.5 a continuous lifting F : D -+ D of a continuous mapping f : D I G -+ DIG' defines a morphism f # : G + G', setting f # ( g ) = g l for any z E D. This inorphism does not depend on the choice of the point z E D.
3.6. UNIFORMIZATION
91
Definition 3.6.3 The homomorphism f# : G to be induced by the mapping f.
+
G' defined above is said
Observe that one continuous mapping induces many homomorphisms between the corresponding group. An induced morphism depends, of course, on the choice of the lifting F. Another choice F' induces a homomorphism (f’)# which is obtained from f # by composing it with an inner automorphism of GI.
Definition 3.6.4 Homomorphisms i : G + G' and j : G + G' are called equivalent if there exists an element gh E G' such that i ( g ) = gh o j ( g ) o (g;)-', holds for all g E G , i.e., if i is obtained composing j with an inner automorphism of G'. We conclude now that all continuous liftings of a continuous mapping f : DIG +- DIG' induce equivalent homomorphisms G G'. In our applications we are mainly interested in homeomorphisms f : DIG + DIG'. Assume now that f is a homeomorphism. The above construction that was done for the mapping f can just as well be applied to the mapping f - I . If F : D + D is a lifting of f : DIG 4 DIG', then F-' is a lifting of f-'. Using these liftings in the constructions for f # and ( f - l ) # we conclude easily that (j-')# = (j#)-'. --f
This means that for a homeomorphism f : DIG homomorphism f # is an isomorphism.
--f
DIG' the induced
L e m m a 3.6.6 Assume that f : D fG + DIG' and g : D fG + DIG' are homotopic homeomorphisms. Then they induce equivalent isomorphisms f# : G + G' and g# : G +- G'.
Proof. Let H : ( D I G ) x I + DIG' be a continuous mapping such that H ( p , 0) = f ( p ) and H ( p , 1 ) = g ( p ) for all p E DIG. This homotopy between the mappings f and g can be lifted to a continuous mapping
H:DXI+D
a(-,
such that #(-,O) is a lifting of the mapping f and 1) is that of g . The mapping B is, furthermore, compatible with the action of the groups G and G' in the sense that for each t E I and for each g E G there exists an gi E G' for which f i ( g ( z ) t, ) = g i (H (z,2 ) ) for each z E D. It suffices to show that this element gl does not depend on t. Then it follows that 0) and I?(-, 1) induce the same isomorphism. Repeating the reasoning of the proof of Lemma 3.G.5 we see that this follows from the discontinuity of the action of the group GI.
a(.,
92
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
Lemma 3.6.7 Assume that f : DIG + DIG' and g : DIG + DIG’ are two homeomorphisms such that the induced isomorphisms f# and g# are equivalent. Then the mappings f and g are homotopic to each other.
Proof. Assume that the isomorphism f # is defined by the lifting F of the mapping f and g# by the lifting G of g . The assumption that the isomorphisms f # and g # are equivalent means that there exists a Mobius transformation g; E G' such that
f#(s>= s:,0 S # ( d
0
(g:,)-l
(3.12)
for all g E G. Since G is a lifting of g, then such is G' = g; o G as well. Let us see which isomorphism is induced by this lifting. To that end write
to conclude, by (3.12), that the lifting G' = g& o G of g induces the same isomorphism than the lifting F of the mapping f . We may, therefore, assume that F and G are liftings of f and g, respectively, inducing the same isomorphism f # : G + GI. Next we construct a homotopy H : D x I -+ D between the mappings F and G defining f i ( z , t ) as that point on the geodesic arc from F ( z ) to G ( z ) which divides this arc in ratio t : (1 - t ) . Then I? is a continuous mapping and H ( - , O ) = F ( . ) , H ( . , 1) = G(.). Using the fact that F and G define the same isomorphism f # : G + G' and the fact that this isomorphism is an isometry of the hyperbolic metric, we then conclude that H ( g ( 4 , t ) = f#(s)0 H ( Z , t )
(3.13)
for all z E D and for all t E I . Equation (3.13) implies that fi induces a homotopy between the mappings f : DIG --f DIG' and g : DIG + DIG'. Lemma 3.6.7 has the following corollary that will be applied later. Lemma 3.6.8 Assume that G is a Fuchsian group acting in the upper halfplane U and that hyperbolic non-identity elements of G have at least three fixedpoints on R U { m}. Then if f : U / G -+ U/G and g : U/G + U / G are homotopic to each other and holomorphic, then f = g .
3.7. M O D E L S F O R S Y M M E T R I C SURFACES
93
Proof. Under the assumptions of the lemma, h = fog-’ is holomorphic and homotopic to the identity. Let H : U U be a lifting of h. Since H is a holomorphic homeomorphism, it is a Mobius transformation and can be immediately extended t o the whole infinite complex plane. Let us do that. Observe that the identity mapping U + U is, of course, a lifting of the identity mapping U / G + U/G. By Lemma 3.6.7 H and the identity mapping induce equivalent isomorphisms G + G. Repeating a part of argument of the proof of Lemma 3.6.7 we may suppose that H induces the same isomorphism G + G as the identity mapping, i.e., that H induces the identity G G. This means that for all g E G, z f 7 i and n E N we have --f
--f
H(g'"z)) = g n ( H ( z ) ) .
(3.14)
Assume that g is hyperbolic and fix a point z E U . Consider the equation (3.14) for various values of n. Recall that lirn g n ( z ) = a ( g ) and
n++m
lim g n ( z ) = T ( g )
n+-w
where a ( g ) is the attracting fixed-point of g and r ( g ) is the repelling fixedpoint. From equation (3.14) it then follows that H ( a ( g ) )= a ( g ) and H ( r ( g ) ) = T ( g ) . This applies to all hyperbolic elements of G. Since hyperbolic elements of G have a t least three different fixed-points. We conclude that the orientation preserving Mobius transformation I1 fixes three points. It is, therefore, the identity mapping.
3.7
Models for symmetric surfaces
Even though we did not prove Theorem 3.4.1 we will, in this section, give a concrete construction that shows u s the existence of all the symmetric surfaces of Theorem 3.4.1. Consider first involutions o with index of orientability k ( o ) = 0. Let n be an integer with g - (78 - 1) = g + 1 - 71 even. Take a Riemann surface of genus (g 1 - 72)/2. Delete 71 open disks from it. Assume that the disks are chosen in such a manner that their closures are disjoint. Then one gets a Riemann surface Y of genus (g 1 - n ) / 2 with n boundary components. Let P denote the Riemann surface obtained from Y by replacing the complex structure of Y with its conjugate structure, i.e. by replacing all local variables z with their complex conjugates z.Y is simply the mirror image of Y. Glue the Riemann surfaces Y and P together identifying the
+
+
94
C H A P T E R 3. GEOMETRY OF RIEMANN SURFACES
boundary points. In that way one gets a compact Riemann surface X of genus g . The identity mapping Y + P induces an antiholomorphic involution u : X + X such that the curves of X corresponding to the boundary curves of Y remain point-wise fixed. Therefore the parameters of Theorem 3.4.1 satisfy n(u) = n and k(u) = 0 for this involution. This is how one can construct topologically all symmetries u of a genus g Riemann surface X satisfying k ( o ) = 0 and n ( u ) = g l(mod 2). Let a be a closed curve left point-fixed under the above involution u. Let A be a tubular neighborhood of a. Then the universal covering of A is the strip A = { z E CI - 1 < I m z < 1).
+
Furthermore we may suppose that u maps A onto itself and that the complex conjugation is a lifting of u : A + A onto i. Then the real axis covers the curve a. Everything here is only topological. So assuming that the covering group of + A is generated by z H z 2 we do not restrict the generality. setting H ( x iy) = (x 1 - y iy). Define the function H : -+ Then the complex conjugation T ( Z iy) = x - iy and H o 7 are both selfmappings of A. Both of them map the real axis onto itself but only the complex conjugation keeps it point-wise fixed. Let fa : X + X be defined setting fa@)-= p for p E X \ A . In A define fa as the mapping induced by H : A --t A . The mapping fa : X + X defined in this way is clearly a homeomorphism.
+
+
+
Definition 3.7.1 The mapping the curve a.
fa :
X
+
+ X is the Dehn twist of
+
X along
It is easy to check that fa o u is also an involution of X. For this involution we have k(fa o u) = 1 and .(fa o ~7)= n(u) - 1. Figure 3.7 illustrates how the involution fa o u maps a curve that intersects the curve a. Repeating this procedure for each component of the fixed-point set of u we can clearly in this way construct topologically any symmetric surface for which n < n(u) and k = 1. This how one can construct topological models for all symmetric Riemann surfaces. Dehn twist was here used to construct topological models of symmetric surfaces. It is an important concept and has many applications. The rather formal definition given above can be replaced by the following shorter definition which relies partly on reader’s geometric intuition. To give this definition for the Dehn twist, orient first the simple closed curve a in some way. You have two choices, they both lead to the same deformation.
3.8. HYPERBOLIC METRIC OF RIEMANN SURFACES
95
Figure 3.7: The twisted involution f a o a does not keep the curve a pointwise fixed. The orientation of the curve a tells us the positive direction along a , and, since X is assumed t o be oriented, it also separates the left hand side of Q from the right hand side. Now cut the surface X open along a. You obtain in this way a new surface X ’ which has two boundary components a’ and a” corresponding to the curve a. These boundary components can be thought of as corresponding to the left hand side of a , call that one a’, and to right hand side of a. Turn the left hand side of a , i.e., the curve a’ full turn around in the positive direction of a and glue it back to the curve a“. In this way we obtain the topology of the surface X is not changed. But curves crossing cr get replaced by curves crossing a and going once around ‘the handle’ corresponding to a. This is also called the left Dehn twist. It is easy to check that the definition of the left Dehn twist does not depend on the orientation of the curve a .
3.8
Hyperbolic metric of Riemann surfaces
By the Uniforniization Theorem, every Riemann surface W (or, more generally, every Klein surface) with negative Euler characteristic can be expressed as W = D I G , where G is a discontinuous group consisting of Mobius transformations mapping the hyperbolic unit disk onto itself. We equip the the unit disk D by the hyperbolic metric of constant curva-
96
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
ture -1. For the definition and basic properties of this metric see Appendix A. By Theorem A.2.1 in Appendix A, the elements of G are isometries of the hyperbolic metric of D. We then conclude that the hyperbolic metric of the unit disk D projects to a metric of the surface W. We call this metric the hyperbolic metric of W. The hyperbolic metric of a Riemann surface is a complete metric of constant curvature -1 (cf. (A.4)). Let W now be a compact hyperbolic Riemann (or Klein) surface with boundary curves c q , . . .,aP.On W we often use the intrinsic hyperbolic metric in which the boundary components are geodesic curves of a finite length (see e.g. [ l , page 451). This metric can be obtained in the following way. First form the Schottky double of W by gluing W and its mirror image W together along the boundary components. The intrinsic metric of W is the restriction of the usual hypcrbolic metric of the Schottky double of W to W itself. Let W be a compact Riemann or Klein surface. The well-known GauilBonnet formula (cf. [34, Page 2281) gives the following expression for the hyperbolic area A ( W ) of the surface W
A ( W )= - 2 ~ x ( W ) .
(3.15)
We will not prove this result here. It will, nevertheless, play an important role in our considerations. The area formula (3.15) implies that the area of a compact Riemann or Klein surface depends only on the topological type of the surface and not on the complex or dianalytic structure.
A Riemann surface is usually thought of as being a sphere with handles. The hyperbolic metric then tells us how thick and how long the handles are. If the surface degenerates in such a way that some handles become very long, then they necessarily become thin at the same time. This is a loose observation can be understood by the invariance of the hyperbolic area. We will later give a completely different proof for this fact using the considerations of Chapter 1. From now on we assume that every compact Riemann or Klein surface without boundary is equipped with the hyperbolic metric. Surfaces with boundary components are - unless otherwise stated - assumed to be equipped with the intrinsic hyperbolic metric.
A main goal of this chapter, and also of this monograph, is to provide tools that allow us to make precise the above loose remarks concerning the degeneration of Riemann surfaces.
3.9. H U R W I T Z T H E O R E M
3.9
97
Hurwitz Theorem
For a later application we discuss here a classical construction which leads to an estimate concerning the order of the automorphism group of a compact classical Riemann surface. This result is known as the Hurwitz Theorem (see [42]). Assume that X and Y are classical Riemann surfaces and that f : X + Y is a non-constant holomorphic function. For any point p E X we may choose local variables z at p and w at f(p) such that z(p) = w ( f ( p ) ) = 0. Then w o f o t-’ is a holomorphic function defined in a neighborhood of the origin where it has series expansion of the form k=n
where n is a positive integer and a,, # 0. A closer analysis then reveals that we may actually choose the local variables z and w in such a way that
w0f
0 .-I((')
= <".
(3.16)
Definition 3.9.1 If n > 1 in (3.16), then p = z-'(O) is a branch point of f. The number n is referred to as the raiiiification number off at p and f is said to have multiplicity n at p. The number b j = b f ( p ) := n - 1 is called the branch number of f at p . Lemma 3.9.1 Let f : X + Y be a non-constant holomorphic mapping between classical compact Riemann surfaces. Let q E Y . The number
PEf -l(q)
is finite and does not depend on the choice of the point q .
Proof. We reproduce here an argument of [29, page 121. For each integer n 2 1, define PEf -l(q)
Using the form (3.1Ci) for f we conclude that Y, is open for each n. Let us show that each Y, is also closed. Therefore fix a positive integer n and assume that the points q1, q 2 , . . . belong to Y, and that the series (qk) converges to a point q E Y . We have to show that also q E Y,. If qk = q for some value of k, then q trivially belongs to Y, and we have nothing to prove. Assume that qk # q for all k. Then we may also assume that the points qk are distinct.
98
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
A non-constant holomorphic function between compact Riemann surfaces can have a t most finitely many branch points. Therefore, by passing t o a subsequence, we may also suppose that none of the points &I is a branch point o f f . This means that, for each k, f-l(qk) consists of at least n distinct points p t , p i , . . ., p k of X. Since x is compact we may suppose, again by passing to a subsequence, that each sequence p: converges t o some p? as k 4 00. Of course it may ha,ppen that the points pj” are not anymore distinct. Now clearly f (p?) = q for each j. It also follows that
even if the points pj” are not all distinct. The set Y, is therefore closed. Since Y is connected, each Y, is either empty or all of Y . For large enough values of n, Y, is clearly empty. We conclude therefore, that mf =
c
(bjb)
+ 1) = supin I yn # 01
PEf-’(q)
is independent of the point q.
Definition 3.9.2 Let j : X -+ Y be a non-constant holomorphic function between compact Riemann surfuces. The total branching number B j o f f is defined setting Bf = *f(P).
c
P€X
This is finite, since b f ( p ) vanishes for all but finitely many points E X.
Theorem 3.9.2 (Riemann-Hurwitz Relation) Let f : X 4 Y be a non-constant holomorphic function between compact Riemann surfaces. Assume that the genus of X is y and that ojY is y. Then g = ~ (-71)
+ 1+ B j / 2 ,
where IL is the degree of f (the cardinality of f- (q) E Y)*
(3.17) is n for almost all
4
For a detailed proof we refer to [42, V.21 or to [29, page 191, which both use the same argument. Equation (3.17) follows by considering a suitable triangulation of Y that lifts to a triangulation of X. Then one can express the Eider characteristics of X and Y in a way that immediately yields (3.17).
3.9. HURWITZ THEOREM
99
Theorem 3.9.3 Let X be a compact Riemann surface of genus g , g > 1. Then the group A u t ( X ) of holomorphic automorphisms of X is finite and has at most 84(g - 1) elements. Proof. This is classical and due t o Adolf Hurwitz ([43, 11.71). First observe that obviously A u t ( X ) acts properly discontinuously on X. Therefore, X / A u t ( X ) is a compact Riemann surface and the projection A : X -+ X / A u t ( X ) is a non-constant holomorphic mapping of a compact Riemann surface of genus > 1 onto a compact Riemann surface. Such a mapping has a finite degree N . Clearly this number N is also the number of elements of Aut(X), i.e., the order of Aut(Xj. We conclude that A u t ( X ) has finite order N . Now K : X -+ X / A u t X is a non-constant holomorphic mapping whose branch points p l , p2,. . .,pTare also fixed-points of non-identity elements of Aut(X). Let Aut(X),, be the stabilizer of pj in Aut(X). Denote by vj the number of elements of A u t ( X ) , . The branching order of K at p j is clearly b , ( p j ) = vj - 1 = ordAut(X),j - 1.
Next observe that there are N / v j distinct points of X which are equivalent t o p j under the action of Aut(X). Therefore the total branch number of K is
The Riemann-Hurwitz relation (3.17) yields now T
2y - 2 = N ( 2 7 - 2 )
1 + N C(1--), "j
(3.18)
j=1
where y is the genus of X / A u t ( X ) . The proof follows now from a detailed analysis of all possibilities of (3.18). Case I: 7 2 2. In this case (3.18) implies
2g
-2
2 2 N or N 5 g - 1.
Case 11: y = 1. In this case (3.18) yields T
2g - 2 = N
C(1--). j=1
1
vj
(3.19)
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
100
If T
T
= 0, then g = 1 which is contrary to our assumptions. Therefore
2 1. Equation (3.19) then implies that 1 2g - 2 2 - N or N 5 4(g - 1). 2
Case
111: y = 0. This is the oiily case where we may have N = 84(g 1). Repeating the above arguments several times finally proofs the theorem. We skip the detailed computation of this case. It can be found in [29, pp. 243 - 2441.
By Theorem 3.9.3 the order of the automorphism group of a compact Riemann surface of genus g is 84(g - 1). It is an interesting and difficult problem to find out whether this limit can be achieved for a given genus g. By explicit computations Klein showed that the automorphism group of a genus 2 Riemann surface has at most 48 elements. Then Gordan ([35]) showed that the order of the automorphism group of a genus 4 Riemann surface is, at most, 120. Wiman showed in [loo] and in [99] in the cases of genus 5 and 6 Riemann surfaces these limits are 192 and 420, respectively. Therefore the bound 84(g - 1) is not attained in the cases of genus 2, 4, 5 or 6 Riemann surfaces. In the case of genus 3 Riemann surfaces this bound is attained: Klein’s quartic s3y t y3
+
2
=0
defines a Riemann surface of genus 3 with the maximal number 168 = 84(3 - 1) = 84(g - 1) automorphisms. This is the only Riemann surface of genus 3 with this property. This detailed analysis of Rieniann surfaces of a low genus indicates that the maximal order 84(g - 1) for the group of automorphisms is rarely achieved. That is the case, indeed. One should observe, however, that it is achieved b y infinitely many genera g. Recently Ravi Kulkarni has investigated the (large finite) groups that are automorphism groups of some compact Riemann surfaces. For more details we refer to [55] and to references given there. This theory concerning the order and the structure of automorphism groups of compact Riemann surfaces can also be generalized to compact non-classical Riemann surfaces. For a detailed account of these extensions of the classical theory see the monograph of Emilio Bujalance, Josh J. Etayo, Jose M. Gamboa and Grzegorz Gromadzki [17]
101
3.10. HOROCYCL ES
3.10
Horocycles
T h e geometry of hyperbolic Klein surfaces X can be studied by using the corresponding group G for which X = D/G. Closed geodesic curves are closely related with the transforinations of the group G. To understand this relation we start with considering groups G that contain parabolic MGbius transformations.
Definition 3.10.1 A Mobius transformation g is said to be a primitive element of a Fuchsian group G , if the following holds: g = h",
11
E G ($ n = f l .
L e m m a 3.10.1 Assume that G is a Fuchsian group acting in the upper hulf-plane U. Let g be a parabolic element and h any non-identity element of G such that the fixed-point of g is also a fized-point of h. Then there are integers m and n such that gm = h".
(3.20)
Pro05 Assume that h is hyperbolic. By conjugation we may assume that g is either g ( z ) = z b and h ( 2 ) = kz for some b # 0, k, b > 0, # 1. T h e set of the elements gn(z) = h-" o g o h"(z) = t bk-", n E Z, contains then a sequence of distinct elements of G converging t o the identity. This is not possible. Therefore h can not b e hyperbolic. Assume next that IL is parabolic. By conjugation we may assume again that both parabolic elements r~ and h have co as fixed point. Then they are of the form g ( z ) = z 6 and h ( z ) = z 6'. T h e statement of the Lemma 3.10.1 (equation (3.20)) is equivalent t o saying that b/b' is rational. But if this ratio were irrational, then
+
+
+
+
(7nb
+ nb'
I m, n E Z }
would be dense in R and one could easily build a sequence of distinct elements of G converging t o the identity. T h a t is not possible since G is assumed t o be discrete.
L e m m a 3.10.2 Suppose that G is a Fuchsian group acting in the upper half-plane U and containing the parabolic transformation g ( z ) = z 1 as a primitive element. Let H = { z I I m z > 1) and assume that h E G. Then either h ( H ) n H = 0 or 12 = g n for some n E Z . H is the largest hag-plane having this property.
+
102
C H A P T E R 3. G E O M E T R Y OF RIEMANN SURFACES
Proof. Assume that
+
az b h ( x ) = - ad c z + d’
-
be = 1 , and h
# gn for any n E Z.
If c = 0, then h has 00 as fixed point. By our present assumptions and by Lemma 3.10.1 this is not possible. Therefore we conclude that 1.1 > 0. We have to show that h ( H ) n H = 8. Let hl = h o g o h-’ and define inductively h k + l = h k o g 0 hi’. Write
Then
ck+l
= 1 -akck = a: = -Ci
dk+i
=
ak+l bk+l
1 -kakCk.
If 1c1< I , then Ck = - c -+~ 0. ~ This implies that U k -+ 1, bk + 1 and dk 1 as k + 00. Therefore we conclude that in this case h k + g. Since IcI > 0, elements h k are also distinct. This is not possible since G was assumed to be discrete. Hence IcI 2 1. Let z E H . Then Im h ( z ) = (Im z ) / l c z dI2. Provided that h is not a power of g , dH’ = h ( a H ) is a circle tangent t o R at a / c . We compute: .--f
+
diameter of H’
=
I
a(z+i)+ b a sup XER c ( x i) d -
+ +
el
-
which implies the first statement of the lemma. The elliptic modular group S L 2 ( Z ) provides an example which shows that H is the largest haJf-plane for which the first statement of the lemma holds. For the basic properties of the elliptic modular group we refer t o the discussion in Chapter 5. A fundamental domain for this group is described on page 182. This remark completes the proof of the lemma.
3.10. HOROCYCLES
103
Definition 3.10.2 Using the notation of Lemma 3.10.2, we say that H is a horocycle at the fixed point of g . We can improve the above result if we assume that the group G does not contain elliptic elements. Here we follow an argument of 1811 and [go]. Assume that this is the case, i.e., that G is a Fuchsian group which acts freely in the upper half-plane U . Let g E G, g ( o 0 ) # 00, and let I ( g ) denote the isometric circle of g . For the definition of the isometric circle see Section 1.4. The center of I ( g ) lies on the real axis, g(I(g)) = I(g-’), and I ( g ) and I ( g - ' ) have the same radius. If g is parabolic, then I ( g ) and I(g-') are tangent to each other at the the fixed point of g , otherwise I(g) n I ( g - l ) = 0. Lemma 3.10.3 The digerence g ( z ) - z is real for a point z in the upper half-plane if and only if t E I(g).
This lemma follows directly from the geometry of the action of the Mijbius transformation g and the definition of the isometric circle. Proof is left to the reader. Lemma 3.10.4 Let g E G be such that g(m) # 00. If G contains the translation gw : z H z w , then ( g ( z ) - z ) / w is not an integer for any 2
E
u.
+
Proof. Suppose that g ( z ) - z = nw for some integer n and z E U. Then o g," fixes z. It follows that 9-l o gc is elliptic, which is not possible by our assumptions.
g-'
Lemma 3.10.5 Suppose that gw : z H z t w is in G. I f g E G does not fix 00, then the radius rg of I(g) sutisfies rg 5 w/4.
Proof. By geometry (3.21) Now ( g ( z ) - z)/wis real on I(g) by Lemma 3.10.3. If the total variation of ( g ( z ) - z ) / w along I(g) were more than 1, then ( g ( z ) - z ) / w would necessarily take an integer value at some point in I(y). By Lemma 3.10.4 this is not possible. We conclude, therefore, that (3.22) Inequality (3.22) together with equation (3.21) implies now the lemma.
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
104
Theorem 3.10.6 Assume that the group G contains, besides the identity, only hyperbolic and parabolic M6bius transformations mapping the upper half-plane onto itself. Assume further that g l ( z ) = z w is a primitive element of the group G. Let g E G be such that g ( o 0 ) # 00. If I m z > w / 4 , then Im g ( z ) < w/4. The number w/4 is the smallest possible.
+
Proof. The first part of the statement follows directly from Lemma 3.10.5.
To prove that w/4 is the smallest number with this property, assume that w = 1 and let go be the transformation z H 2/(42 + 1) and G1 be the group generated by go and gl. Then G1 is a Fuchsian group without elliptic elements and g ( ( - 1 + i)/4) = (1 + 4 / 4 . Theorem 3.10.6 implies now immediately the following result: Theorem 3.10.7 Let X be a hyperbolic Riemann surface with punctures. Each puncture of X has a horocyclic neighborhood of area 4. The inner boundary curve of this horocycle has length 4.
Observe that the horocyclic neighborhoods of Theorem 3.10.6 at disjoint punctures are not necessarily disjoint. An example of this situation is provided by the group GI. Area 4 horocycle associated to the element go is the euclidean disk of radius with center at f . Area 4 horocycle associated to They overlap. the element g l ( z ) = z 1 is the half-plane Im z > Let g be any parabolic Mobius transformation mapping the upper halfplane onto itself. Then we may always assume that g is conjugate either to the transformation z --i z $- 1 or to z + z - 1. If g is conjugate to z -+ z 1, then g-' is conjugate to z -+ z - 1. The orientation reversing Mobius transformation z H -7 conjugates z H z 1 to z H z - 1. Assume now that G is any Fuchsian group acting in the upper half-plane U and let g be a primitive parabolic element in G. The above observation together with Lemma 3.10.2 implies that there is always a hyperbolic disk (or a half-plane) D, E U such that dD, is tangent to dU at the fixed-point of g and if h(D,) n D, # 8, then h E (9). In accordance with Definition 3.10.2 we say that the disk D, is a horocycle of the parabolic transformation 9.
+
+
3.11
a
a.
+
Nielsen's crit erium for discontinuity
Theorem 3.10.6 allows us to give a fairly general criterium that guarantees the discontinuity of a Mobius group acting in the upper half-plane. Theorem 3.11.1 Assume that G is a group of Mobius transformations mapping the upper half-plane I I onto itself and containing the translation
3.1 1. NIELSEN’S CRITERIUM FOR DISCONTINUITY
105
Figure 3.8: A horocyclic neighborhood of a puncture on a hyperbolic Riemann surface. This surface is the surface of revolution of the tracktrix curve which is characterized by the property that its tangent line meets the x-axis at unit distance from the point of tangency. This surface has curvature -1.
106
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
gl(z) = z -t 1. If G does not contain elliptic elements, then G is either properly discontinuous or contains only elements jxing 00.
Proof. Suppose that G contains elements not fixing the infinity. In view of Theorem 3.5.4 (on page 84) it suffices t o show that the regular set Q(G) of G contains a point in the upper half-plane. If g E G does not fix the infinity and gw(z) = z w is in G, then, by Lemma 3.10.5, w 2 4r,. (3.23)
+
From (3.23) it follows that the subgroup G, of the translations of G is cyclic. We show next that the group G does not contain any hyperbolic elements fixing the infinity. Assume, on the contrary, that h E G is hyperbolic and h(00) = 00. Then we may suppose that h ( z ) = kz for some k > 1. Observe that rg is not changed if g is conjugated by a translation. Now, 11-" o gw o h" E G, and
(h-" o gw o h " ) ( z ) = z
+ k-".
This contradicts (3.23). Let g w ( z ) = z w , w > 0, be a generator for G,. Choose zo E U such that Imz0 > By Theorem 3.10.6, the disk D ( z o , w / 2 ) = { z I Iz-zol < w / 2 } does not contain points z , z # zo, that are equivalent t o zo under G. We conclude that zo E S2(G).
+ :++.
Theorem 3.11.1 is a special case of the following more general result.
Theorem 3.11.2 Assume that G is a group of MObius transformations mapping the upper half-plane onto itself. If the group G does not contain elliptic elements, then it is discontinuous. In view of Theorem 3.1 1.1 we have to shown only that purely hyperbolic Mobius groups fixing the upper half-plane is discontinuous. Proof for this can be found in Appendix B, Theorem A.8.5 (on page 240). The above result is a special case of a more general result stating that a MZibius group mapping the upper half-plane onto itself is discontinuous if it does not contain infinitesimal elliptic elements. This has been first shown by C. L. Siegel in [ 8 5 ] , where Siegel calls this theorem 'a result of Jakob Nielsen'.
3.12. CLASSlFlCATlON OF FUCHSIAN GROUPS
3.12
107
Classification of Fuchsian groups
Let D, be a horocycle associated t o a parabolic Mobius transformation g. It is immediate that Dg/(g) is conformally equivalent t o the punctured unit disk D* = { z I 0 < 121 < l}. Assuming that g is a primitive element, we conclude, by Lemma 3.10.2, that Dg/(g) is conformally homeomorphic t o an open subset of the Rieinann surface U / G . Using this non-compact subset of U / G it is easy t o construct an open covering of U/G which does not have a finite subcovering of U/G. This implies that U/G is not compact. We have, therefore, the following result. Theorem 3.12.1 Let G be a Fuchsian group acting in the upper half-plane U. If U / G is a compact Riemann surface, then the group G does not contain parabolic elements.
By Theorem 3.12.1 we conclude that all non-identity elements of a Fuchsian group corresponding to a compact Riemann surface are hyperbolic Mobius transformations. Let now 7 be a closed curve on a Riemann surface UIG. Let g = gr be a Mobius transformation corresponding to the homotopy class of the curve 7 as explained in Lemma 3.6.2 and in Lemma 3.6.3. Recall that for a hyperbolic Mobius transformation infEEU& ( z , g(t)) is obtained for any z E u x ( g ) . Here a x ( g ) denotes the axis of the hyperbolic transformation g and du is the hyperbolic metric of the upper half-plane U. We have, furthermore, infzEUd u ( z , g ( z ) ) = log k(g), where b(g) > 1 is the multiplier of g. We conclude therefore that if the transformation gr is hyperbolic, then the homotopy class of the curve y contains a geodesic curve which is the projection of the geodesic arc from z to yy(z) for any point z E az(g,). Furthermore we conclude that if gr is parabolic, then the homotopy class of the curve 7 does not contain any geodesic curves. In this case we say that 7 is a curve going around a puncture of U / G . Let G be a Fuchsian group acting in the upper half-plane.
Definition 3.12.1 Let G ( z )= { g ( z ) I g E G } denote the orbit of a pont z under the action of G . A point x E R U {cs} i s a limit point o j G if there exists a point z E U such that x belongs to the closure of G ( t ) . The set L(G) ofG.
Definition 3.12.2 A Fuchsiun group G acting in the upper half-plane is said to be of the first kind if L ( G ) = R U {m}. Groups that are not of the first kind are said to be of the second kind.
108
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
This terminology is standard today. The reader should observe, however, that, in old literature, groups of the first kind were sometimes called groups of the second kind (and vica versa). For instance in a paper of Burnside ([ls])this terminology was used but the meaning was the contrary. Lemma 3.12.2 Assume that the Riemann surface U / G is compact. Then the Fuchsian group G is of the first kind. Proof. This argument is due to Pekka Tukia. Let r E R be an arbitrary point in the real line. I t suffices to show that the closer of the orbit of the point i E U contains the whole real line. Let 6 > 0 be arbitrary. Let
ZI,(r) = { z E
c 1 ) z - 7-1 < E }
denote the euclidean disk of radius c and center at r E R. By the properties of the hyperbolic metric, U C ( r fl ) U contains hyperbolic disks D R of arbitrarily large radius R. Now the image of any hyperbolic disk of radius
R > diameter of UIG = sup{dv/c(p, q ) I p , q E U/G} under the projection T : U +. U / G necessarily covers the whole Riemann surface U/G. Therefore any such disk contains a point z such that ~ ( i=) ~ ( 2 ) .This point z belongs to the orbit { g ( i ) [ g E G} of i . We conclude, therefore, that I- E R belongs t o the closure of the orbit of i. Repeating this argument we could prove the above observation stating that i can be replaced by an arbitrary point z in the upper half-plane. Likewise one can show that the limit set of a Fuchsian group is the closer of the set fixed-points of non-identity elements of that group.
3.13
Short closed curves
Theorem 3.12.1 allows us to apply considerations of Chapter 1 to estimate lengths of intersecting closed geodesic curves on a hyperbolic Riemann surface. We will next show that if two closed geodesic curves intersect, then they cannot both be short. Lemma 3.13.1 There exists a universal constant q, q > 0 , such that for any compact Riemann surface X (which may have boundary components) the following is true: Let (Y and /3 be closed geodesic curves on W with lengths < 7. Then either (Y = j3 (as set of points) or the curves a and p do not intersect.
3.14. COLLARS
109
Proof. This result follows directly from inequality (1.25) in Corollary 1.5.5 on page 33. Assume first that Q and fi are closed and intersecting geodesic curves such that Q # p (as sets of points). Write W = U / G for a Fuchsian group G. Let g and h be a hyperbolic transformations, g covering a and h covering ,f3 (cf. Definition 3.6.1). Provided that g and h are obtained using the same isomorphism i of Lemma 3.6.3, g and h are now hyperbolic Mobius transformations with intersecting axes. Applying the arguments of Theorem 3.12.1 we can conclude that the non-identity elements of the group G are hyperbolic Mobius transformations. This implies that the coininutator c = [ g , h] of the hyperbolic transformations g and h is hyperbolic as well. Therefore the assumptions of Corollary 1.5.5 are satisfied. Let La and Lo be the lengths of the geodesic curves Q and p, respectively. Then the multiplier kl of g satisfies kl = eea and that of h is k2 = eep. Inequality (1.25) gives then the following inequality for the lengths of the curves Q and /3 : deep (eea (3.24) < (eep - 1 ) 2 4eea ' Constant q is then the positive solution of the equation
(3.25) A numerical estimate for the positive solution of equation (3.25) is 7 x 1.33254. Another inequality of the same type as inequality (3.24) is given in [ l , Lemma 1 on page 941. It is not quite as strong as the one presented here. It yields the numeric estimate 1.01859 for the constant v. It is interesting t o observe that the above inequality was obtained using only the facts that the Mobius transformations 9 , h and their commutator c = [g, h] are hyperbolic. The discontinuity of the action of the Fuchsian group G does not play any role here.
3.14
Collars
Definition 3.14.1 Let A C X be a non-empty subset of a (hyperbolic) Riemann surface X and let 6 be a positive number. The €-distance neighborhood of A is the set
C H A P T E R 3. G E O M E T R Y OF R I E M A N N SURFACES
110
Let X now be a hyperbolic Riemann surface, p E X a point and a a simple closed geodesic curve on X. For an E > 0 we say that N , ( { p } ) is a disk if N , ( { p } ) is homeomorphic to a disk in the complex plane. Likewise we say that N , ( { p } ) is a collar if it is homeomorphic t o an annulus in the complex plane. We say further that a collar N E ( a )has width 6.
Let (Y be a simple closed geodesic curve in the interior of X . A collar N,({p}) of area 2p is called a p-collar at a. If a is a boundary component of X , then a collar N , ( c Y )of area p is called a p-collar. The area and the width of a collar a t a geodesic curve of length e are related t o each other in the following way. Lemma 3.14.1 Assume that cr is a simple closed geodesic curve in the interior of a hyperbolic Rieinann surface X and that N , ( a ) is a p-collar at a . Then we have p = e, sinh E
where
e,
denotes the length of cr on X .
The proof of this result is an elementary computation in hyperbolic geometry. We will leave the details to the reader. Arguments are similar t o the ones of the proof of Lemma 3.14.7. Next we use considerations of Chapter 1 t o estimate the distance dx(a,P) between closed geodesic curves a and on a Riemann surface X = DIG. By the considerations based on Theorem 3.12.1 we can associate t o any closed geodesic curves a and /? two hyperbolic Mobius transformations g E G and h E G such that the axis of g and h project onto a and p, respectively. Furthermore, if Icl = k ( g ) and kl = k ( h ) are the multipliers of g and h, then C, = log k1 and t?p = log kl. Let dx(a,P) = logk. If cr and ,d do not intersect each other, then we can deduce, by Theorem 1.5.7, that
(3.26) where f ( t ) = & +l/J? for t > 0. Estimate (3.26) gives us iinmcdiately an estimate for the distance d x ( a ,P ) in the following way. The right hand side of (3.26) can be rewritten so that one has (fit*)(&+*) k> (3.27)
(fi-*)(w2-&.
Estimate 3.27 implies the following result.
3.14. COLLARS
111
Lemma 3.14.2 Let a and p be closed geodesic curves of length C, and l p , respectively, o n a hyperbolic Riemann surface. Then either d X ( a , P ) = 0 ( i n which case a and p intersect) or d X ( f f ,p )
> log coth(CJ4)
+ log coth(Cp/4)
(3.28)
Estimate (3.28) means that short non-intersecting curves on any hyperbolic Riemann surface are rather far apart from each other. Estimate (3.28) has important applications for us. Let
6(a)= inf{dx(a,P) 1 P a closed geodesic curve ,f3 r l a = 8).
(3.29)
For a fixed value of C,, the right hand side of (3.28) is a decreasing function of C p tending t o the limit log coth(!,/4) as C p -+ 00. This shows the following result:
Lemma 3.14.3 For a simple closed geodesic curve a ,
We will now use the above considerations to estimate the size of the maximal collar a t a simple closed geodesic curve. To that end observe the following result. Lemma 3.14.4 A simple closed geodesic curve cy on a hy~erboZicRiemann surface X has always a collar N 6 ( a ) ( a )of width 6(a).
Proof. It is clearly enough t o show the following: Lemma 3.14.5 If the closure N , ( a ) of a €-distance neighborhood N , ( a ) of a simple closed geodesic curve a on a hyperbolic Riemann surface X is not homeomorphic to a x [ - E , E ] , then there exists a closed geodesic curve ,B that does not intersect a such that p n N , ( a ) # 0.
Proof. It is enough to consider the case where N , ( a ) z a x ( - E , € ) and N E ( a )$ a x [ - € , E ] . Then N , ( a ) has either one or two boundary components. Let us assume that N , ( a ) has two boundary components. T h e case of only one boundary component can be treated in the same way as the present case and will be left t o the reader. Figure 3.9 illustrates this case. Let a' and a'' denote the boundary components of N , ( a ) . At least one of them,
C H A P T E R 3. G E O M E T R Y O F RIEMANN SURFACES
112
Figure 3.9: N,(cr) has two boundary components. say a', is not anymore a simple closed curve. Then a' can be expressed as a finite union of simple closed curves 71,. . .,yn, n 2 2, such that yi and y;+1 intersect at one point pi. Consider the curves y1 and y2 intersecting a t the point pl. Assume that both curves have the positive boundary orientation (as parts of the boundary of N , ( a ) ) . Let y be the geodesic curve freely homotopic to y1-y;'. Now y is a geodesic curve which is not homotopic to a. y is furthermore homotopic to a closed curve that does not intersect a. We deduce, therefore, that a n y = 0. For topological reasons it is, on the other hand, clear that y n N , ( ( Y )# 0.0 Lemmata 3.14.4 and 3.14.3 imply now the following result: (Y be a simple closed geodesic curve of length la on a hyperbolic Riemann surface X . The curve a has afwuys a p-collar N,(a) for p = p ( & ) = l,sinh (logcoth(l,/4)). The width of this collar is 6 =
Theorem 3.14.6 Let
log coth e,/4. Observe that the above function p is a positive decreasing function and that lirn p ( l ) = 2. (3.30) e+o+
3.14. COLLARS
113
In order to apply the above results it is necessary to take a closer look at the geometry of collars. We are mainly interested in collars at boundary components of hyperbolic Riemann surfaces. We will, therefore, assume that a is a boundary geodesic of a hyperbolic Riemann surface X. What is said below is, nevertheless, true also for general simple closed geodesic curves. Let c > 0. Assume that the <-distance neighborhood N , ( a ) for a boundary component a is a collar at a. The collar N , ( a ) has itself two boundary components a and a". The latter is called the inner boundary component, while a is the outer boundary component. Let L be the length of a and e* that of a*.
Lemma 3.14.7 The length of the inner boundary component a* of a pcollar N , ( a ) at Q is e* = (3.31)
,iW.
Any simple closed curve that is freely homotopic to a and lies outside of this collar has length at least e*. Proof ([13, Lemma 4, page 891). Let W s be the Schottky double of W. Express W = U / G , where G is a Fuchsian group acting in the upper half+ ) G the isomorphism plane U. Let Q € a be a base point and i : A ~ ( W , Q defined on page 87. The choice of the point Q here is immaterial. Giving an orientation to the curve a we can now interpret a as a curve defining a point of the fundamental group xl(W,Q).Here the orientation chosen for a does not play any role. Important is that, via the isomorphism i : A ~ ( WQ) , -+ G we may associate a Mobius transformation g to the curve a. Choosing a different orientation for a would only mean that we associate g-' to a rather than g . The Mobius transformation g is hyperbolic by Theorem 3.12.1. Then, by the definition of the isomorphism i , the axis of g projects onto a simple closed geodesic curve on W s which is homotopic to the curve a. But a itself is also a geodesic curve. In each homotopy class of closed curves on W s there is a unique geodesic curve. We conclude that the axis of g projects onto the curve a under the projection U -+ W s = U/G. (3.32) By conjugation we may assume that g ( z ) = eez. Then the positive imaginary axis is the axis of g. Considerations on page 24 (see Fig. 1.1) imply now that, for some 00, N , ( a ) is the image of a region A
{ z E U ( 1 5 J z J< e e , Jargz - -1 < Bo, Rez 2 0) 2
under the projection (3.32). The projection is, furthermore, injective on this region.
114
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
Use the polar coordinates T , 8 in U setting z = ireie, -n/2 < f? < n/2. The hyperbolic metric of U becomes ( ( d T 2 / r 2 ) do2)/ cos2 8. Direct computation gives then p = L tan&. (3.33)
+
The inner boundary curve of the p-collar N , ( a ) at of the segment {(r,e)l1 5 r 5 e', e = eo}
Q
is now the image
under the projection (3.32). An easy calculation shows that this segment has length e* = -. e cos eo These expressions obtained for e* and for p imply now (3.31).0
Lemma 3.14.8 A p-collar at a boundary component of length L contains a y-collar f o r every y , 0 < y < p . Every point of the inner boundary component the former lies at the distance (3.34)
from the inner boundary component of the latter. Proof. It is obvious that a p-collar contains every y-collar for 7 < p. The distance between the inner boundary components of such collars is simply the difference in the widths of these collars. So the proof amounts in computing the width of a p-collar. Express our p-collar as in Lemma 3.14.7. Let w(p) denote the width of the collar. It can be computed in terms of polar coordinates. We obtain: =log( 1
+ sin 80) . cos eo
(3.35)
Equation (3.33) in conjunction with equation (3.35) implies now w ( p ) = log
(5 + /L@) .
(3.36)
This expression for the width implies now equation (3.34). Now we can compute a corollary to Theorem 3.14.6 by the above results:
Corollary 3.14.9 Every boundary geodesic a on a Riemann surface X has a collar whose inner boundary component is a simple closed curve of length > 2.
3.15. LENGTH SPECTRUM
115
Proof. Let a be a boundary geodesic of length C. Consider the collar of Theorem 3.14.6. By formula (3.31) the inner boundary curve of this collar has the length
e*
= e*(e) =
d
m
(3.37)
where p(C) = C sinh (log coth C/4) is the function given in Theorem 3.14.6. Elementary analysis shows that !*(C) > 2 for all C > 0. Theorem 3.14.6 is not the best possible result in this direction. Explicit calculations about the hyperbolic geometry of pairs of pants and hyperbolic polygons show the following result. Lemma 3.14.10 Define the function p ( e ) setting
Every simple closed geodesic curve cr on a hyperbolic Riemann surface X has a &!)-collar for every C 5 t?,, where t?, is the length of cr. Furthermore, two such collars at disjoint simple closed geodesic curves are disjoint as well. This result is known as the Keen Collar Lemma. We will not prove it here because the slightly weaker version of the result, Theorem 3.14.6, is sufficient for our purposes. A clear and elementary proof of this result can be found in the forthcoming monograph of Peter Buser ([22]). For other proofs of related (and weaker) versions of this result see e.g. [44], [36] or [ l , Pages 95-96]. Above results give us information about the location of short geodesics on a hyperbolic Riemann surface. We conclude these deliberations by considering the set of the lengths of all closed geodesic curves.
3.15
Length spectrum
Definition 3.15.1 Let UIG be a Riernarin surface. The set of the lengths of closed geodesics on U / G is culled the length spectrum of the Riemann surface U / G . It is denoted by ,C( U /G ). The number of homotopy classes of closed curves on a compact Riemann surface is countable. Since each homotopy class contains only one geodesic curve, also the length spectrum of a (compact) Riemann surface is (at most) a countable set. Theorem 3.15.1 The length spectrum ,C(U/G)= { l , , & ,. . .} of a compact Riemann surface U / G is a discrete subset of R.
116
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
Proof. Assume the contrary. Then there exists a constant M and infinitely many closed geodesic curves 7i, i = 1 , 2 , . . .such that L; = C(7;) < M , where L(7;)denotes the length of the hyperbolic geodesic y;. Let x : U ---+ U/G denote the projection. Choose a point p E U / G and points p ; E 7i such that d(p,p;) = d ( p , y i ) , where d denotes the hyperbolic distance. Choose a point @ E n-'(p) and points fii E n-'(pi) in such a way that dU(fi,p;) = d(p,pi). Here dU denotes the hyperbolic metric of the upper half-plane U. Assume that gi E G covers t,he homotopy class of the curve 7;(as explained in Lemma 3.6.3) and that @; lies on the axis of the transformation 9;. Then &tijygi(P))
5 d d i j , I ? i ) + I ( 7 i ) + du(gi(@),gi(@i))
+ 2d(P,Pi) + I ( 7 i ) -
= 2 4 / ( @ , @ i ) l(7:)
=
Since G acts discontinuously and since the set y; contains infinitely many different curves yi we conclude that diy(@,$i) --* 00. This means that d(p,p;) + 00 on U/G. But that is not possible since U / G is assumed to be compact. C o r o l l a r y 3.15.2 Among closed geodesic curves o n a (compact) Riemann surface there are curves with minimal length. This corollary follows immediately from Theorem 3.15.1. It leads to the following interesting question: Let c ( X ) denote the length of shortest closed geodesic curve on the Riemann surface X . Define L9
= sup € ( X )
where suprenium is taken over all Riemann surfaces of genus g . Estimate the number L g for each g . O b s e r v a t i o n 3.15.3 Theorem 3.15.1 can immediately be generalized to the case of a Riemann surface that is obtained from a compact Riemann surface U / G by deleting finitely many points. Such Riemann surfaces can be Unijormized by a Fuchsian group G' which contains parabolic elements. These parabolic elements correspond to the punctures of UIG', i.e., to points that were deleted from U/G in order to get UIG'. The above argument can be applied also i n this more general case. Details are left to the reader.
3.16. P A N T S DECOMPOSITIONS
117
We conclude this section by the following remarks. Keeping the differential geometric aspect in mind, we call isomorphic Riemann surfaces isometric. Rieinann surfaces having the saine length spectrum are, on the other hand, called isospectric. If X and Y are isometric Riemann surfaces, then clearly they have the same length spectrum. The converse is not true: Marie-France Vigneras has first constructed examples ([95]) of hyperbolic Riemann surfaces that have the same length spectrum but which are not isomorphic to each other. These examples of Vigneras had a very large genus. Peter Buser has subsequently shown ([all, see also [20]) such examples for genera g = 5 and g 2 7. R. Brooks ([15]) has generalized this approach of Buser and constructed examples of isospectric and non-isometric Riemann surfaces of genus 4 and G . In the case of one-holed torus and Rieinann surfaces of genus two, the situation is different. Peter Buser and Klaus-Dieter Semmler have shown (cf. [19]) that in these cases isospectric Rieinann surfaces are also isometric. It is not known whether isospectric Rieinann surfaces of genus three are necessarily isometric. The above reinarks lead to the following question: How many nonisometric Riemann surfaces of genus g can have the same length spectrum? H. P. McKean ([G2] and [G3]) has first shown that this number is finite. Peter Buser ([20]) has then shown that at inost 507g3 non-isometric Riemann surfaces of genus 9 can have the saine length spectrum.
3.16
Pants decompositions of compact surfaces
Let C be a coinpact and oriented topological surface of genus g > 1. Then X ( V 0. Definition 3.16.1 A standard pair of pants P is the domain
whose three boundary components are order as follows: y1 = { z E C l l z l = 1, = { z E Cllz - 11 = and 7 3 = { z E C1l.z 11 =
72
i}
+
i}.
For technical convenience we have here assumed that the boundary curves of a standard pair of pants form an ordered set. Then we may speak of the first, the second and of the third boundary component. A standard pair of pants is a triply connected domain which is clearly homeomorphic to any usual pair of pants. Definition 3.16.2 A topologicul Hausdorff space P' together with a homeomorphism h : PI + P onto the standard pair of pants is called a pair of pants.
118
C H A P T E R 3. G E O M E T R Y OF RIEMANN SURFACES
Figure 3.10: A standard pair of pants is homeomorphic to a usual pair of pants. Each pair of pants is a surface with three boundary components. The boundary components of the standard pair of pants form an ordered set. Via the homeomorphism h : PI 3 P the set of boundary components of P' gets also an order. We may, therefore, always speak of the first, second and third boundary component of a pair of pants. Pairs of pants are building blocks for surfaces. It is easy to see that one can build all compact surfaces with boundary components starting from a number of pairs of pants PI,. . ., P, and gluing them together in some suitable way along the boundary components. Observe that it is also possible to build non-orientable surface from pairs of pants (that are orientable themselves). That is done by changing - in a suitable fashion - the orientations in which the boundary components of the pairs of pants are glued together. Elementary computation gives the value x ( P ) = -1 for the Euler characteristic of a pair of pants. If A and B are two subsets of the same manifold, then - provided that the respective Euler characteristics are finite X ( A u B ) = X ( A ) t x ( B ) - X(A n B ) . Let X be a manifold obtained by gluing two pairs of pants PI and P2 together along their first boundary components. Then PI n P2 is a circle and x(Pl n P 2 ) = 0 . We conclude that x ( X ) = x ( P l ) x ( P 2 ) .This arguments can immediately be generalized to obtain the following result.
+
Theorem 3.16.1 Each compact surface C , with x ( C ) < 0 , can be composed by gluing the boundary curves of - x ( C ) pairs of pants together in a suitable fashion.
3.16. PANTS DECOMPOSITIONS
119
By Theorem 3.16.1 we may always decomposed a surface C, x ( C ) < 0, into - x ( C ) pairs of pants. Such a decomposition
is understood to be ordered. So we can always - when referring to a pants decomposition - speak of the first pairs of pants, the second etc. Let P be a decomposition of C into pairs of pants. The boundary curves of the respective pairs of pants are simple closed curves a1, a2,.. .,a , on the surface C. We call these curves the decomposing curves. We assume that the decomposing curves are given some orientation. Therefore we may speak of the positive direction of a decomposing curve. We conclude that: 0
Decomposing curves are simple closed curves on C.
0
The decomposing curves do not intersect.
0
No pair of the decomposing curves are homotopic to each other (or to each other's inverse).
Any set of decomposing curves is a maximal set with these properties. Recall that we have agreed that any decomposition P of a surface C into pairs of pants is an ordered collection of pairs of pants. Also the boundary curves of any pair of pants is an ordered collection of simple closed curves as well. Therefore the set of decomposing curves of a pants decomposition P is also an ordered set, the order being defined by all the other orderings. Next consider the case of symmetric surfaces. Recall Definition 3.4.1: a symmetric surface is a (topological) surface C together with an orientation reversing involution u : C --+ C. For certain applications it is important to study pants decompositions of symmetric surfaces. The decompositions themselves should be symmetric as well. We start with some technicalities. Let C be a surface with boundary components and u : C + C an orientation reversing involution. A pair ( a 1 , a z ) of simple closed curves a1 and a2 on C is called a u-pair if a(al)= 012 and if either a1 = a2 or the curves are disjoint. A a-pair ( Q I , a2) is called essentiaf if a1 is not freely homotopic to any boundary component of C. Observe that this condition implies that for an essential a-pair ( a l , a 2 neither ) one of the curves aj is freely homotopic to a boundary component. Assume that X is such a complex structure on C that the mapping u : ( C , X ) + ( C , X ) is antiholomorphic. We equip the Riemann surface X = (C, X ) with the usual intrinsic hyperbolic metric.
120
C H A P T E R 3. GEOMETRY OF RIEMANN SURFACES
A a-pair ( c q , ctz) on the Rieinann surface X is geodesic if both curves aj,j = 1 , 2 , are geodesic curves in the intrinsic hyperbolic metric of (C, X). Since u : X + X is now an isometry of the hyperbolic metric, both curves cq and C Y ~have the same length, which is referred to as the length of the a-pair ( a l , a 2 ) . Next sections are devoted to showing that there always exists a uinvariant set of 39 - 3 disjoint and simple closed geodesic curves on X in such a way that the length of the longest one is bounded by 21g. This set of curves then determines a a-invariant, i.e., a symmetric decomposition of X into pairs of pants. We will construct this decomposition in an inductive way. We first choose a u-pair that is as short as possible. It turns out that it can be always chosen in such a way that its length is less than 7 9 1. This is shown below. We cut the surface open along this a-pair to obtain a Riemann surface Wo with boundary components. This Riemann surface needs not be connected anymore. We start in an inductive way to cut the Riemann surface Wo into smaller parts in a way that is, at each step, compatible with the action of u and uses as short curves as possible. Here we are considering symmetric surfaces. The same argument applies t o all compact Riemann surfaces. A compact Riemann surface of genus g can always be decomposed into pairs of pants by simple closed geodesic curves of length < 21g. That follows from the present arguments. We consider here only the more complicated case of symmetric surfaces. The arguments that we present in the subsequent sections are taken from [23].
+
3.17
Shortest curves on a hyperbolic Riemann surface with a symmetry
We assume now that X = (C, X) is a fixed compact Riemann surface of genus g , g > 1 , and (T : (C, X ) + (C, X ) an antiholomorphic involution. Lemma 3.17.1 Let w be a piecewise geodesic closed curve with at most finitely many double points on a Riemann surface X . If w has at most two points where it is not smooth, then w is not homotopic to a point.
Prooj. Assume that w is homotopic to a point and consider the universal covering T : U --f X . If w is homotopic to a point, then there is a lift 3 of w to U which is a closed curve and a union of at most two geodesic arcs in U . But this is clearly impossible.
3.1 7. SHORTEST CURVES
121
Lemma 3.17.2 Let a be a closed geodesic curve on X with minimal length. Then a is simple and
C, 5 2 arcosh (29 - 1) < 2 log(4g - 2).
(3.38)
Proof. It is clear that a curve with minimal length is simple. Let p E a. Consider the sets W P H = {QE
x I dist(p,q) < .I.
For 0 < T 5 :la the set N , ( { p } ) is isometric to a hyperbolic disk in the upper half-plane U and has area (cf. Theorem A.3.1) area N , . ( { p } ) = 2n(coshr - 1). On the other hand, N , . ( { p } ) c X and area N , . ( { p } ) 5 area X = 4n(g - 1) where g is the genus of X . Taking
T
= i l , we get
This yields inequality (3.38).
Lemma 3.17.3 Let a be a simple closed curve of minimal length o n X and u : X -+ X an antiholomorphic involution. Assume that .(a) n Q # 0. T h e n either .(a) = a or .(a) intersects a at exactly one point. Proof. If neither is the case, then Q intersects .(a) at some finite number of points P I , . . . , p , , n > 1. Let p l and p2 be two consecutive intersection points. Let a’ be an arc of the geodesic curve a with end-points pl and p 2 and which has length 5 Let a’’ be similar arc on the geodesic curve u(a)also with end-points pl and p2. Now a‘a’’ is a piecewise geodesic closed curve of length 5 C,. By Lemma 3.17.1 a’a’’ is not homotopic to a point. Since a’“‘ is not smooth, there is a closed geodesic curve ,d hornotopic to d a ” and
it!,.
This is not possible proving the lemma. Let us consider in detail the case where Q is of minimal length and a intersects .(a) exactly a t one point. Figure 3.11 shows a tubular distance
122
C H A P T E R 3. G E O M E T R Y OF RIEMANN SURFACES a
\/
I
Figure 3.11: Tubular distance neighborhood of
!
Q
U .(a).
3.1 7. SHORTEST CURVES
123
neighborhood T, = N , ( a u .(a)) for some small positive distance E . (The figure actually shows a fundamental domain of this neighborhood. Dotted line a has to be pasted to line a' in the obvious way so that x is identified with d,y with y' etc.) Similarly line 6 has to be pasted to line b'. Since p is the only intersection point of a and .(a) we must have a ( p ) = p . Components of the fixed-point set of an antiholomorphic involution of a compact Riemann surface are always simple closed geodesic curves. We conclude therefore that the set of fixed-points of u contains a geodesic arc s through the point p . Therefore the restriction of a to T, is a reflection in the arc s. Observe that the boundary of T, is a simple closed curve freely homotopic to a(o(a))-la-la(a).Curve y in the figure is a simple closed curve in the free homotopy class of a a ( a ) . Observe that au(a) is freely homotopic to n(cm(a)).(These two curves differ only by parametrization.) By Epstein's theorem on isotopies, [28], see also [22], there exists an isotopy of X onto X which deforms N c ( au .(a)) into an embedded one-holed torus T with boundary geodesic 7 2 freely homotopic to a(c~(a))-'a-'a(a). The closed geodesic curve y1 which is freely homotopic to aa(a) is also simple and is contained in T . We have a ( T ) = T , a(y1) = y1 and a(y2) = 7 2 . By inequality (3.38) we get e,, 5 4 arcosh (29 - 1) < 41og(4g - 2). (3.39)
,TI.
We remark that
e,
5 810g(4~- 2).
(3.40)
although we do not need this in the following. In conclusion we observe that the above considerations yield the following lemma.
Lemma 3.17.4 Assume that X is a compact Riemann surface of genus > 1, and a : X + X an antiholoinorphic involution. Let (a1,az) be a a-pair of minimal length e,. If a1 n a2 = 0, then this minimal length satisfies e, 5 2 arcosh (29 - 1) < 2 log(4g - 2). If a1 = az, then
g, g
e, 5 4arcosh(2g - 1) < 410g(4g - 2). Observe that Lemina 3.17.4 implies the following result. Let (at, a2) be a a-pair with minimal length on X . W, = X\(ay, U a 2 ) is a Riemann surface with boundary components and it need not be connected. The boundary of Wo consists of geodesic curves and its length satisfies
Lawo 5 8 arcosh (2g - 1) < 8 log(4g - 2).
(3.41)
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
124
Inequality (3.41) is an immediate consequence of (3.38) and (3.39)
3.18
Selection of additional simple closed curves on a hyperbolic Riemann surface with a symmetry
Above we have shown that it is always possible t o select a geodesic a-pair ( c r l , c r 2 ) on the symmetric Riemann surface X in such a way that cutting X open along this pair of simple closed curves yields a Riemann surface Wo whose boundary dWo satisfies
taw, 5 8 arcosh (29 - 1).
(3.42)
Observe that for g > 2 (3.42) implies that
law, < 79.
(3.43)
For g = 2 we have tawo < 79 + 0.102. We start with this Riemann surface Wo. In this section we show how to select new short essential a-pairs inductively in such a way that they always cut out either a pair of pants or a four holed sphere. At step k we consider the Riemann surface wk (which need not be connected). From Wk we obtain a new Riemann surface w k + s in the following manner. On WE:we will select a a-pair ( P 1 , P z ) that is not too long. The procedure for the selection of this a-pair will be explained later together with an estimate for its length. Let sk be the union of all those components of Wk \ (PI U 0 2 ) that are pairs of pants or spheres with four holes. Let s = - x ( S k ) , where x ( S k ) denotes the Euler characteristic of Sk. Put = rv,
Together with the 0-pair
\ (S, u0 1 u0 2 ) .
( c r 1 , ( ~ 2 )we
will find, on those components of
Sk that are four holed spheres, additional curves P such that = P.
0
0
P satisfies the sanie length inequality than the total boundary of Wk+2.
It turns out that a t each induction step we pass either from Wk t o to Wk+2until we are left with a collection of pairs of pants. The numbering is made in such a w;ty that a t step k, when we are considering
Wk+l or
3.18. ADDITIONAL CURVES
125
the Riemann surface Wk, we have already cut out k pairs of pants (with short boundary curves) from the original surface. Therefore this process necessarily stops with the Riemann surface W2g-2. If at some step we have produced a Riemann surface Wk for which the total length of the boundary, law,, is less than 2, then we use Corollary 3.14.9 and form the (maximal) collar at one of the boundary components of Wk. We replace W,: by the complement of this maximal collar. Corollary 3.14.9 implies then one of the boundary components of W k has length at least 2 so that we have e8wk > (3.44) at each step of the induction. Observe that this leads to Riemann surfaces whose boundaries are not geodesic curves. But this does not cause difficulties in our argument. Let W,: be the Riemann surface of induction step k. Let 0 1 , . . .,a,be the boundary components of Wk. They are simple closed curves on the Riemann surface wk.Let tawk be the total length of these curves. Recall that we use the notation e,, to denote the length of the boundary component aj. Then Cawk = e,, . For c > 0 consider the set Nc(8Wk).For small values of 6 we have N,(dWk) awk x [o, E ) .
'&
Definition 3.18.1 Let €k
= SUP{€
I N , ( a w k ) x aw,x [O, )}.
This number 6 k depends on the total length XI, := law, and plays a key role in our computations. We have a nuinber of different possible configurations of the set
Below is a list of all the possible configurations. We will consider the most complicated ones in detail. We have here divided the possible configurations into two main cases which then fall into subcases. List of different configurations 1. It may happen that closures of two different components of N,,(dW,:) meet. Assume that this is the case and call these components N , , ( a l ) and K , ( a 2 ) . This case falls further into subcases. They are:
C H A P T E R 3. G E O M E T R Y OF RIEMANN SURFACES
126
Figure 3.12: a ( a l )= a1 and (a)
4 0 2 )
# a2.
4%)= 0 2 . In this case also c ~ ( N , , ( a l U ) N c k ( a 2 ) ) = N,,.(al) U N , , ( a z ) . The new decomposing geodesic curve p will be the simple closed geodesic curve freely homotopic to the inner boundary of the set
If we cut the surface open along this curve p, we get one pair of pants and a new component W k + 1 . The total length Xk+l := law,,, of the boundary of this new component satisfies
(b) o ( Q ~=) a1 and
(~(a2 =)a2. In
this case we may choose the new decomposing curve p in the same way as before. Equation (3.45) holds also in this case.
(c) ( ~ ( a l=) a1 and 4 ~ x 2 )# a2. This is the worst case. Figure 3.12 illustrates this case. Let q be the geodesic arc of length 2 € k joining a1 to a2. By the definition of Ek such an arc can be found. ) a1 Let p be the end-point of q on a1. Then p and ~ ( p divide into two arcs a: and a:, both having p and o(p) as end-points. Next observe' that since (T is an orientation reversing involution, ( ~ ( a i=) a: and .(a:) = a:. The additional curve p is now 'This is a key point in our argument and follows from the fact thatu is an orientation reversing self-mapping of a. Such a mapping has necessarily 2 fixed-points on a.
3.18. ADDITIONAL CURVES
127
freely homotopic to the curve a;7)a27)-'~:u(~)u(a2)-'~(7))-'. Here we assume that the orientations are chosen in a suitable way (cf. Fig. 3.12) so that p is a simple closed curve. Cutting the surface w k open along this curve p yields one sphere with four holes 5’; and another component W k + 2 . The total boundary length x k + 2 := f?awkt, of this new component satisfies xk+2
5 x k t gck.
(3.46)
T h e four holed sphere S l can further be divided into two pairs of pants by the a-invariant curve
6 = a; 7)a2 7)- 1a;- 1 a ( 7)) a ( a2) - 1 0 (7)) - 1 . Here we may change a; to a; if necessary (i.e., if a: is shorter than a:). The length of this new curve S satisfies the inequality
(d) a(a1)# a1 and a(a1)# a 2 . Then also a 2 because a is an involution. Since
n N&Z)
u(a2)
# a1 and a ( a 2 ) #
#0
also NCk(a(ol))
NLk(a(a2))
# 0.
Let be the simple closed geodesic curve freely homotopic to the inner boundary component of the set N c k ( a l )fl N L k ( a 2 ) . We cut next the surface Wr, open along the geodesic curves /3 and a@). (Observe that it may very well happen that a(p) = p.) We get two pairs of pants and a new surface w k + 2 . The total length Xr,+2 := law,,, of the boundary of this new surface satisfies now the inequality (3.47) Ak+2 5 x k SEk.
+
2. In the second main case some component N c k ( a j )touches itself. This means that N E k ( a j ) aj X [ O , E ~ , but ) N E k ( a j ) $ aj X [ O , E k ] . Let y be the inner boundary component of N c k ( a j ) .We have the following subcases : (a) a ( a j ) = aj and the inner boundary component y is curve with a number of double points p l , . . .,p , none of which is fixed under U.
In this case y can be decomposed into three parts. They are:
128
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES i. a simple closed curve yu such that u ( y u ) = 7u, ii. connected union y1 of simple closed subcurves of -y such that ~ ( nn)y1 = 0, and iii. 7 2 = o(y1). In this case, let 01 be the simple closed geodesic curve freely homotopic t o 71, /32 = 0(/31) and p3 the simple closed geodesic open d o n g curve freely homotopic to yo. Cut the surface these curves. In this way one obtains a sphere with four holes S4 and a new surface W k + 2 . The total length Ak+2 of the boundary of W k + 2 satisfies now the inequality (3.47). The orientation reversing involution u maps the curves aj and yo onto themselves. It follows that g has, on both curves aj and yo two fixed-points and the fixed-point set of u contains two (geodesic) arcs 61 and 62 which both connect the curves aj and yo. Let A = crj U 61 U yo. Then the set A is invariant under the involution u. So is also any c neighborhood N , ( A ) of A. For small values of c, one boundary component of N,(A) is a ginvariant simple closed curve contained in the four holed sphere S4. This curve is homotopic t o a simple closed geodesic curve p is S4 which is invariant under 0,decomposes S4 into two pairs of pants and whose length satisfies the inequality
wk
ep
5 Pa,
+ 4ck 5 A k + 4ck.
(3.48)
(b) a ( o j ) = crj and the inner boundary component y is curve with a number of double points p l , . . ., p n . At least one of them is fixed under c. Assume that u ( p 1 ) = p l . Then p l divides the inner boundary component into two parts (which are both taken to be closed curves with double points) 71 and 72. We either have u(y1) = y1 or u(y1) = 72. In this case let /3j be the simple closed curve freely homotopic to the curve yj. We cut the surface open along these curves /31 and /32. We get one pair of pants and a new surface W k + l . The total length Ak+l of the boundary of W k + 1 satisfies now the inequality (3.45). (c) u(crj) # crj. In this case again the inner boundary of N,,(aj) decomposes into two parts that are freely homotopic to simple closed geodesic curves /31 and /32. Cut the surface open along the curves PI, /3z, .(PI) and 4 / 3 2 . (NB It may happen that e.g. u(p1) = PI. This does not pose any problems.) This cutting yields us two pairs of pants and a new surface wk+z. The total length Ak+1 of the boundary of Wk+l satisfies now the inequality (3.47).
wk
3.19. NUMERICAL ESTIMATE
129
In conclusion we observe that we have the following result: Lemma 3.18.1 Let wk be a compact Riemann surface with boundary components and let u : wk + wk be a antiholomorphic involution. Assume that X(wk)< -1. T h e n it is always possible
either to choose a n essential geodesic 5-pair (PI,,&) which satisfies the length inequality given below and is such that wk \ (PI U pz) has at least one component which is either a pair of pants or a four hole sphere or t o choose a 5-invariant set (,&,pz,p3) of simple closed geodesic curves on wk which satisfies the length inequality given below and is such that wk \(Dl Up, Up3) has ut least one component which is either a pair of pants or a four hole sphere.
Let s k be the union of all the components of wk \ Ujpj that are spheres with either four or three holes. Let s = X ( S k ) . The lengths of the curves pj satisfy e , eaWk -k 4sck where c k is the number given b y Definition 3.18.1. If one of the components of SX.is a four hole sphere S;, then it can be decomposed into two pairs of pcints b y a o-invariant simple closed geodesic curve p such that ep 5 law,+ 8Ek The length of each boundary curve y of a pair of pants obtained at step k satisfies e, < -k 4sckLet
wk+s =
3.19
Wk \ Sk. The length of the total boundary of
wk+ssatisfies
Numerical estimate
A numerical estimate for the lengths of the decomposing curves can be obtained now by estimating the c.onstants Ck of Lemma 3.18.1. Call the decomposing curves that we have obtained, by the above inductive process, ( a l ,a2,.. .,a3g--3). Assume that the numbering corresponds also to the order of forming the curves. Let Wo be the first Riemann surface with boundary components which we obtained by cutting X open along a o-pair with minimal length. By Lemma 3.17.4 we know that law, < 8 arcosh ( 2 g - 1).
130
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
Consider a Riemann surface wk at some induction step k. If law, < 2, then we delete the maximal disjoint collars at boundary components and replace the original surface Wk with this new Riemann surface. We may, therefore, suppose that lawk > 2. Hence we have
We conclude in this case that €k
5 arsinh (2n(g - 1)) := TI.
(3.49)
We can improve our estimate concerning €k if we assume that law, 2 7g. Then, by repeating the above reasoning concerning the area of N,,(dWk), we obtain 474-lEk 5 arsinh 7g 1) := TZ. (3.50)
)
(
By Lemma 3.18.1 we have the following upper bound for the lengths of all the boundary components ctk, obtained at step k:
L,, 5 law,
+4 ~ k
(3.51)
(3.52) according to as whether the induction step goes from Wk+Z. By the same lemma we also have
or
wk to Wk+l
+
law,,, I lawk fh.
or to
(3.54)
Since lawo < 79 + 1, we get, expecting the worst,
lawk ‘ffk,
I 5
+ + 8T1 + 4(k - 2)T2
79 1 1 -k 79
+ 8T1 + 4kTz
(3.55) (3.56)
with an obvious modification for k = 0, 1, 2. The last possible step at which we may find new curves is k = 2g - 3. This yields the upper bound
This proves the following theorem:
3.20. MATRIX GROUPS
131
Theorem 3.19.1 Let X be a compact Riemann surface of genus 9 , g > 1. Assume that u : X X is an antiholomorphic involution. Then X has a o-invariant set of 3g - 3 disjoint simple closed geodesic curves such that each curve is of length c 21g. --f
One should observe here that the above upper bound 219 is not sharp.
A closer examination of the above arguments allows the reader to find a lower upper bound for the lengths of the 39 - 3 curves. We conclude by observing that the symmetry u played no role at all in Theorem 3.19.1. It only made the proof more complicated. Therefore we have also the following result:
Theorem 3.19.2 Let X be a compact Riemann surface of genus g , g > 1. X has u set of 3g - 3 disjoint simple closed geodesic curves such that each curve is of length < 219.
3.20
Groups of Mobius transformations and matrix groups
Let X be a Riemann surface of genus g , g > 1. By the Uniformization we may express X as the quotient UIG for some Fuchsian group G. Such a Fuchsian group is a subgroup of PSL2(R), the group of holomorphic automorphisms of the upper half-plane. Elements of PSL2(R) are of the form s(z) =
az
+b
with ud - bc = +l.
Therefore we can associate a matrix
ij=(:
;)
(3.57)
in SLz(R) to each Mobius transformation g : U --+ U . This is, of course, standard but not quite unique. Both matrices ij and -4 correspond t o the same Mobius transformation. Let g and 11 h e two Mobius transformations in PSL2(R). Let ij and k be the associated matrices. Then Z = ki-'/&-'ij is a matrix corresponding to the commutator c = h o 9-’ o h-l o g of h and g . Observe that even though the matrices f L and ij corresponding to the mappings h and g are determined only up to sign, the matrix E depends neither on the choice of the sign of fz nor on that of ij. So we may speak of the matrix of the commutator c . In this and the subsequent sections we study traces of matrices of the commutators c of hyperbolic Mobius transformations h and g whose axes
C H A P T E R 3. G E O M E T R Y OF RIEMANN SURFACES
132
intersect. In the next section we show that for hyperbolic commutators c the trace of the corresponding matrix Z is always negative. Let 91, . . .,g z P be the standard set of generators for the Fuchsian group G. Let c j = [gzj-l,g2j] = g ~ j -1o g ogzj ~ -1 ~ -ogzj-1 ~ be the commutator of gzj-1 and g2j and let E j be its matrix. It turns out that the traces of the matrices
are all negative for j < p and equal to +2 for j = p . A corollary of this result is that a Fuchsian subgroup of PSL2(R) can always be lifted to a subgroup of SL2(R). This is not obvious since the exact sequence 1 + {fl} + S L 2 ( R ) I P S L , ( R ) + 1 (3.58) does not split. The fact that Fuchsian groups lift has actually been proven several times by many methods and authors. An interesting survey of the history of the problem together with an elegant proof for a generalization of this result can be found in Irwin Kra's paper [53]. Here we follow the arguments presented in [82].
3.21
Traces of commutators
We use the classification of pairs of Mobius transformations that was introduced in Chapter 1, Section 1.4. (Recall the notation from page 24, we use the same notation here.) Let g and h be Mobius transformations fixing the upper half-plane U , and let ij and Ti be some matrices in SLz(R) corresponding t o g and h. Then the matrix product j f i is a representation of g o h. Denote the trace of a matrix A by x(A) and observe that ~ ( i j k = ) x((-ij)(-k)). Lemma 3.21.1 ~ ( 3 = ) x(jijk').
Proof. Let jj =
(
). A
straightforward multiplication of matrices
shows that x(jijk-l) = (detk)X(j) = ~ ( j ) proving the lemma. Suppose that g and h are hyperbolic transformations without common fixed points. Lemma 3.21.2 If (g,h ) E Int P and
x(ij)x(k) > 0, then x(ijL) < 0.
3.21. TRACES OF COMMUTATORS
133
Pruuf. By Lemma 3.21.1, we may suppose that a (h ) = 0, r ( h ) = 1 and a ( g ) = 00. Then
and g(z)
=
h(z) =
k1.z-
t ( k 1 - l), k1 = k(g) > 1, 2
(1 - k
2 )t ~ k2
, k2
= k(h) > 1.
It follows that
= t f ( k ' k 2 ) -t (1 - t ) f
(3
- < -2.
Suppose now that g and h have intersecting axes.
Lemma 3.21.3 The commutator c = [ g , h] = 11 0 9-1
is hyperbolic if and only if
(11,
g-'
o
0
h-'
0
g
ii-' o g) E Int P.
Proof. Denote h' = g-' o 11-' o g. To consider the class2 of the pair ( h ,h'), let t = (~(h),~(h’),a(h’),a(h)) and k = k ( h ) = k(h’). Recall that here r ( h ) , r ( h ' ) are the repelling fixed points and a ( h ) , a(h') are the attracting fixed points while k is the coininon multiplier of h and h'. Then
'For the definition of the class of a pair of Mobius transformations see page 1.4.
134
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
By Lemma 3.21.1, we may suppose that a(h) = 00, ~ ( h '=) 0, ~ ( h ' = ) 1 and r ( h ) = t . Since g-’(T(h))
= a(h') = 0
g-’(a(h))
= T(h') = 1,
we have g(0) = t and g( 1) = 00. On the other hand, the axis of g intersects with the axis of h and that of h'. From g(1) = 00 it then follows that a(g) < t
< 0 < r(g) < 1.
The commutator c = h o h' is hyperbolic if and only if ( h ,h') E I n t P U Int 3-1, i.e., if and only if t < t 2 or tl < t . Since tl = 0 and t < 0, the assertion follows. Lemma 3.21.4 Zfc = [g, h] is hyperbolic and Z; = L i j - l L - l i j , then x(E) < 0 .
Proof. Since x(K) = ~(k-’),we have x(L)x(ij-’L-’ij) > 0 by Lemma3.21.1. By Lemma 3.21.3, (h,g-'oh-'og) E I n t P . Hence the pair (h,g-’oh-’og) fulfills the assumptions of Lemma 3.21.2 for any choice of the representations i j and of g and It, and the assertion follows. Let G be a Fuchsian group acting in U . Suppose that U / G is a compact Riemann surface of genus p . Suppose that g E G and h E G correspond to simple closed geodesics a and /3 of U/G, respectively. If (Y and j3 do not intersect, then either ( g , h ) E I n t P or (g,h-') E I n t P depending on the cyclic order of the fixed points of g and h. (This follows from the considerations on page 25, see also [go].) Let 91, g2, . . ., gzP be a canonical set of generators of G. Let i j 1 , i j 2 , .. . , i j 2 p be representations of the generating transformations in SL2(R). Then E j = [ij2j-l,ij2j] is a representation of c j . Since U/G is compact, G contains, besides the identity, only hyperbolic elements (Theorem 3.12.1). Hence by Lemma 3.21.4, ~ ( i ' j )< 0. For any j = 1 , . . .,p - 2 , the transformations cj
0
cj-1
0
.
*
-
0
c1,
Cj+l,.
..,c p
correspond to simple closed geodesics on U/G. Moreover, all these geodesics o C I ) E Int P. are pairwise disjoint and ( c j + l , c.j o
---
Theorem 3.21.5
x(EjEj-1 . . . , ? I )
< 0 f o r j = 1 ,...,p -
1.
Proof. For j = 1 the assertion holds by Lemma 3.21.4. Suppose that ~ ( , ? j - ~ E l ) < 0. Since x(Ej) < 0 and (cj,cj-lo...ocl) E I n t P , we have, by Lemma 3.21.2, x(,?jZj-1 .Zl)< 0.
--
If we choose j = p - 1, then we have
3.22. LIFTINGS OF FUCHSZAN GROUPS
-
0
x(Ep-1Ep-2
0
x(Ep)
< 0,
(+I,
cp-2 a
0
cp = (Cp-1
0
Theorem 3.21.6
*
.El)
135
< 0,
- - - o c1) E Int P, *
.
1
0 c1)-
x(ZPZp-1
* *
.Zl) = 2.
--
.Z1 = &Identity. Proof. Since cp o cp-l o . o c1 = id, we have Z p Z p - l By Lemmata 3.21.1 and 3.21.4, we may suppose that
o
-a-'
Then, by Theoreiii 3.21.5, Zp-1Zp-2
.-.El
EPZp-1
3.22
--
El
,a>l. = 2.';
Hence we have in fact
= Identity.
(3.59)
Liftings of Fuchsian groups
Let G c PSL2(R) be a group of Mobius transformations. Consider the exact sequence (3.58). We say that a subgroup G c PSL2(R) can be lifted to SLz(R) if there exists a subgroup r c SL2(R) such that w : ’I --$ G is an isomorphism. Let G be the group generated by the elliptic Mobius transformation g ( z ) = -I/. of order two. It is iinmediate that this group cannot be lifted to SL2(R) because the matrix of g ,
is of order 4 while g is of order 2. In [53] Irwin Kra proves the more general result stating that a subgroup G c PSLz(R) can be lifted to SL?(R) if and only if G does not have any eleiiients of order 2 ([53, Theorem p. 1811). Kra's proof is based on the existence of square roots of the canonical bundle of a compact Riemann surface. He treats the general case with Maskit's combination theorem. Let g1,g2,. . . ,yzP be standard generators for a Fuchsian group G as before. Then all generators gj and commutators c j are hyperbolic Mobius
136
CHAPTER 3. GEOMETRY OF RIEMANN SURFACES
transformations. Let i j j be any matrix corresponding to the Mijbius transformation g j . Let Ej = [ i j z j - l , i j z j ] , j = 1 , 2 , . .., p . Consider the group I' = ( 3 1 , . . .,$,). By Theorem 3.21.6 the matrices Ej satisfy the relation 3.59 for any choice of the matrices i j j . It is also obvious that there cannot be any other relations among the generators ijj of r because any such relation would imply a new relation among the generators gj of G. We conclude that the groups r and G are isomorphic and that the restriction of the projection A : SLZ(R) + PSLz(R) t o r is an isomorphism. Therefore we have:
Theorem 3.22.1 Genus p , p > 1 , Fuchsian subgroups of PSL2(R) have 2 2 P different liftings to SLz(R).
Chapter 4
Moduli problems and Teichrnuller spaces 4.1
Introduction to Chapter 4
T h e famous Rieinunn moduli problem is the following: Characterize the set of isomorphism classes of Riemnnii surfaces of u given topological type. Riemann solved this problem for simply connected Riemann surfaces. The Riemann mapping theorem states that there are only three different types of simply connected Riemann surfaces; namely the Riemann sphere, the finite complex plane and the unit disk. Considerations presented for the definition of quasiconformal mappings in Chapter 2 imply that a doubly connected Riemann surface X is always a ring domain of type A ( r x , R x ) = { z E C I r x < IzI < R x } for some R x , T X , oc) 2 R x > T X 2 0. The quotient R X / T X determines the isomorphism class of a doul~lyconnected Riemann surface X. Therefore the moduli space of d o ~ b l yconnected Riemann surfuces, i.e., the space of isomorphism classes of doubly connected R.iemann surfaces can be viewed as the infinite half-line { T I T > 1) U {oc)}. This is actually not quite accurate: { z E C I 0 < IzI < 1) is not isomorphic to { z E C I 0 < IzI < m} but for both of them R , y / r x should be defined ot be 00. We do not consider this technical complication here. T h e situation becomes more complicated as the topology of the Riemann surface in question gets richer. First such complications are encountered already with triply connected Rieinann surfaces, i.e., with pairs of pants. Let now P 2 be a topological pair of pants. We consider P 2 as being an oriented closed Rieniann surface with three boundary components which are simple closed curves. Let
M ( P ' ) = {X
Ix
a complex structure on P'}.
137
138
CHAPTER 4 . TEICHMULLER SPACES
Figure 4.1: A pair of pants. We assume that the complex structures X E M(P2)agree with the orientation of P 2 and make ( P 2 , X )a Riemann surface with three boundary components. Write X = ( P 2 ,X ) = UJG for a Fuchsian group G. The fundamental group x1(P2,p) of P 2 at some base-point p E P2 is freely generated by the homotopy classes of two simple closed curves a and /3 going around two of the three holes of P2. Provided that the orientations are suitably chosen, ap is a simple closed curve going around the third hole. Assume that this is the case. Let X = ( P 2 , X ) = U/G. Then G is a Fuchsian group freely generated by two Mobius transformations g and h. The group G is also isomorphic t o al(P2,p)and we assume that the isomorphism i : 7rl(P2,p) G is such that i ( ( a ) )= g and i ( ( p ) )= h. By considerations related to Theorem 3.12.1 (see page 107) we conclude that the elements of G \ { I d } are hyperbolic Mobius transformations (since we assumed that P 2 is a compact surface with boundary components). Since a and /3 are simple closed curves, the hyperbolic transformations g and h are simple or primary elements of G (see page 33). By Theorem 1.5.6, either (9,h ) or (g-', 1 2 ) is in the class P depending on the orientation of a and p. Since a/3 is a simple closed curves, it follows that (9, h) satisfies (1.26) (on page 33) and that in fact (9,h ) belongs to the class I n t P . Assume now that XI is another complex structure of P2 which agrees with the orientation of P 2 . Let X’ = (P2,X') = U/G'. Then G' is a Fuchsian group freely generated by two Mobius transformations 9' and h' corresponding to ( a ) E x 1 ( P 2 , p ) and to ( p ) E Irl(P2,p). This means that
4.1. INTRODUCTION TO C H A P T E R 4
the identity mapping P 2 -+ P2 induces a mapping f : X lifting F : U -+ U such that
139 -+
X’ that has a
F o g = g' o F and F o h = h' o F,
(44
Recall that by Lemma 1.4.1 of Chapter 1, the pair ( 9 ,h ) E P is determined, up t o a conjugation by a Mobius transformation, by the parameters k(g), k ( h ) and k(g o h). The Mobius transformations g and h cover homotopy classes of curves going around two of the boundary components of P2 (cf. Definition 3.6.1). The Mobius transformation g o h covers the homotopy class of a curve going around the third boundary component, and log k(g), log k ( h ) and log k(g o h ) are the lengths of the geodesic curves homotopic to the boundary components of X (measured in the complete hyperbolic metric of X , not in the intrinsic metric). Here k ( g ) , k ( h ) and k(g o h ) are the multipliers of the corresponding Mobius transformations. In view of Lemma 1.4.1 and Lemma 3.6.7 we have now the following result: L e m m a 4.1.1 The homotopy class of the identity mapping ( P 2 , x ) + (P2,X ' ) contains a holomorphic homeomorphism if and only i f the geodesic curves homotopic to the boundary components of P 2 have the same length on ( P 2 ,X ) and on ( p 2 ,X ' ) .
Lemma 4.1.1 leads to the following construction. Observe that the group Homeo(P2) of homeomorphic self-mappings of P2 acts on M ( P 2 ) in the following way. Let X E M(P2)and f E Homeo(P2). If f is orientation preserving, then j * ( X ) E M(P2)is defined as that complex structure of P 2 for which f : ( P 2 ,f * ( X ) )+ ( P 2 ,X ) is a holomorphic homeomorphism. For orientation reversing mappings f, f : ( P 2 , f * ( X )-+ ) ( P 2 ,X) is required to be antiholomorphic. The subgroup Homeoo( P 2 ) of IIomeo( P 2 ) , which consists of mappings homotopic to the identity mapping, acts also on M ( P * ) .
Definition 4.1.1 The Teichmuller space of a pair of pants P2 is T ( P 2 )= M(P2)/€Iomeoo(P2).
Here the Teichmuller space T(P 2 ) is defined only as a set. The definition is motivated by Lemma 4.1.1 which implies that the mapping
140
CHAPTER 4. TEICHMULLER SPACES
is injective. It is also onto by Lemma 1.4.1. Here a,p and 7 denote the boundary curves of P2, l , ( X ) , l p ( X ) and f & ( X ) are the lengths of the geodesic curves on ( P2,X ) homotopic to these boundary curves and R+ = { r E R I r > 0). Therefore, the Teichmuller space of a pair of pants P2 is simply the space R : which is a rather simple 3 dimensional real manifold.
Definition 4.1.2 The moduli space of P 2 , M ( P 2 ) , is the set of isomorphism classes of complex structures of P 2 . In other words,
M ( P 2 )= M(P2)/Homeo+(P2), where Homeo+( P2)is the subset of Homeo(P2) consisting of orientation preserving mappings. Topological arguments show that an orientation preserving mapping f : P2 + P2 is hoinotopic to the identity if and only i f f keeps the boundary components fixed (a sets, not necessarily point-wise). It is, on the other hand, clear that Homeo+( P 2 ) contains mappings that permute the boundary components in all the 6 possible ways. We conclude, therefore, that M ( P 2 ) = (R+)3/perm. of coord. (4.3) This simple example of pairs of pants serves to illustrate the differences between the TeichmCller space and the moduli space of a surface. The ideas that lead to the definition of the Teichiniiller space, given by Lars V. Ahlfors on October 18, 1953 (cf. [4, 5 VIII, Page 53]), were originally due to Oswald Teichniiiller ((941). He called these spaces ‘moduli spaces’ and proposed that the original Rieinann moduli space should be replaced by this new moduli space which is a covering of the Riemann moduli space. Today the moduli space originally defined by Teichmiiller is known as the Teichmuller space and the Rieinann moduli space is usually referred to as the moduli space. There are deep reasons why the Teichmuller spaces of compact surfaces are, in some sense, easier to study than the corresponding moduli spaces. One of these is the famous Extremal Mapping Theorem of Teichmuller ([93], cf. 4.2.3). That result states that, within each homotopy class of homeomorphisms between compact Riemann surfaces of genus g > 1 there is always a unique extrernul quasiconformal mapping. (Extremal in the sense that its maximal dilatation is the smallest in its homotopy class.) This result will be explained (but not shown) in more detail in the proceeding sections. It opened new avenues to attack the moduli problem. In this monograph we will only discuss some of the consequence of the Teichmiiller extrenial mapping theorem. We will not prove it here. The original proof of Teichiniiller ([93]) is very difficult to read. First actual proof for this theorem was given by Ahlfors in [4]. A good presentation of this theorem can be found for instance in the monograph of Olli Lehto[GO].
4.2. QUASICONFORMAL M A P P I N G S
4.2
141
Quasiconformal mappings of Riemann surfaces
In this section we extend the definitions related t o quasiconformal mappings t o mappings between Riemann and Klein surfaces. We will review basic results concerning these mappings. This serves t o describe the usual constructions for the topology and complex structure of Teichmiiller spaces. Our main interest is t o study Teichmiiller spaces using the methods of Chapter 1. This gives us information about the topology and real analytic geometry of Teichmiiller spaces. The deliberations of this and the subsequent chapters serve only t o explain the connections to the more classical approach (cf. e.g. [60]) that uses quasiconformal mappings.
Definition 4.2.1 A hoineoinorphism f : X -+ XI between Klein surfaces is K-quasiconformal if it is locally K -quasiconformal in the following sense: for each point P E X there is a connected open neighborhood U of P , a dianalytic local variuble z : U + z ( U ) C C and a dianalytic local variable w : V + w(V) of a neighborhood V o f f ( P ) such that the mapping wo f 0z-l is a I(-quasiconformal honieomorpliisrii of u neighborhood of z( P ) . Since Klein surfaces need not be orientable, we cannot speak of orientation preserving mappings between them. This causes minor technical difficulties and makes some considerations and formulae cumbersome. Computing locally we may form the Beltrami differential (cf. Definition 2.4.4) of a quasiconformal mapping f : X -, X I between Klein surfaces: If {(U;,zi)l i E I } is a dianalytic atlas of X (whose charts Ui are connected), then for each index i E I there is a dianalytic chart (Vji,wji) of XI such that f ( U ; ) C K i and wji o f o zzT1 is quasiconformal in z;(Ui). Let r; be the complex dilatation of this quasiconformal mapping. Consider the family of functions pi = T; o zgrl associated t o the different dianalytic charts of X . The function pi is a complex valued La-function defined on U; and llp;lla 5 $$ < 1. To see how the different functions pi are related t o each other, consider two intersecting dianalytic charts ( U i , z i ) and ( U j , z j ) of X. Define the function T;j: Ui n Uj + C setting
Tij = (B(2.i 0 ~ 7 ' )t 8(zi o z;')) Here we have used the usual notations
o zj.
142
CHAPTER 4 . TEICHMULLER SPACES
and
The following transformation formula is a straightforward computation:
If z; o zJTi is holomorphic at z j ( P ) , P E Uj n U j , then
If z; o zzl is antiholoinorphic at zj(P), then
Definition 4.2.2 We s a y that a collection p = {p;Ii E I } of measurable functions pi : Ui -+ C associated to dianalytic charts (U;,z;) of X is a (-f,l)-differential of the Klein surface X i f the functions pi satisfy the transformation rules (4.4) and (4.5) (on page 142). If, in addition,
then p is a Beltrami differential of the Klein surface X . Let us use the notation D(-'?')(X) for the space of (-1,l)-diflerentials of X and the notation B e l ( X ) for the space of the B e h a m i differentials of X. For a Riemann surface X, (i.e., for an orientable Klein surface X ) D(-l*l)(X)is a complex Banach-space and B e l ( X ) is its open unit ball. If X is not orientable, then, since the transformation rule (4.5) has to hold, elements of B e l ( X ) cannot be multiplied by complex numbers. Hence, for a non-orientable Klein surface X, B e l ( X ) is the open unit ball of a real Banach space. By the above remarks, the complex dilatation of a quasiconformal mapping of a Klein surface X is a Eieltrami differential of X . T h e following theorem is an immediate application of the existence and the uniqueness theorems of plane quasiconformal mappings: Theorem 4.2.1 Let p be a BeIframi differential of a Klein surface X = ( C , X ) then there exists a dianalytic structure X , of the topological surface C such that the identity mapping ( C , X ) -+ (C,X,) is quasiconformal with the complex dilatation p. Iff; : X -, f , ( X ) , i = 1,2, are two p-quasiconformal mappings of X , then there exists an isomorphism g : f l ( X ) + f z ( X ) such that f i = g o f i .
4.2.
Q UASICONFO R M A L MAPPZNGS
143
Proof. Let U = {(Ui,z;) I i E I } be a dianalytic atlas of ( C , X ) . Let -P C be the measurable function associated t o the chart (U;,z;)by the Beltrami differential p . By Theorem 2.4.6 there exists p o zZT1-quasiconformal mappings f; : .zi(V;)+ C . Choose one for each index i E I . Then by the transformation rule (2.8) U, = { ( U i , f; o .zi I i E I} is dianalytic atlas of C. Let X , be the dianalytic structure defined by this atlas. By the definition it is now clear that the identity mapping (C, X ) -+ (C, X,) is p-quasiconformal proving the first statement. The second statement follows directly from the transformation rule (2.8).
pi : Ui
Let X = U / G where G is a reflection group. A (-1,l)-differential p of X lifts t o a function p : U -+ C. The transformation rules (4.4) and (4.5) are equivalent with the following formulae:
for orientation preserving Mobius-transformations g E G and
for glide-reflections u E G.
Definition 4.2.3 A measurable function p satisfying the transformation rules (4.6) and (4.7) with respect to the elements of a wjection group G , is a (-l,I)-differential of the group G. If, in addition, llpllm < 1, then p is a Beltrami differential of the group G. We use the notation D(-'*')(G) for (-I,l)-diflerentials of a reflection group G , and the notation BeE(G) for Beltrami differentials of G . Provided that the group G does not contain orientation reversing elements D(-'y')(G) is a complex Banach space and BeZ(G) is its open unit ball. If G contains also glide-reflections, D ( - ' J ) ( G ) is a real Banach space. There is a real analytic homeomorphism between the unit disk and the complex plane. Nevertheless, there are no quasiconformal mappings between them. This follows rather easily from the quasi-invariance of conformal invariants under quasiconformal mappings. The case of compact Klein surfaces is, however, different: homeomorphic compact Klein surfaces are also quasiconformally equivalent by the following result. Theorem 4.2.2 Let X and Y be compact Ii'lein surfaces. Each homeomorphism f :X + Y is homotopic to a quasiconformal mapping.
CHAPTER 4. TEICHMULLER SPACES
144
Proof. It is well known that each homeomorphism f : X + Y is homotopic to a diffeomorphism. The dilatation quotient of such a diffeomorphism can be computed at each point of X. It does not depend on the choices of the local variables, and it is a continuous function on X. Since X is compact, this function has a finite maximum K on X . Hence a diffeomorphism homotopic to f is a quasiconformal mapping of X. There are many ways to find a diffeomorphism homotopic t o a given homeomorphism. For more details and a direct construction we refer to [60, Theorem V.1.5.1.
Let X and Y be homeomorphic compact Klein surfaces. By Theorem 4.2.2 there are quasiconformal mappings X Y . Teichmiiller considered the problem of finding, in a given homotopy class of mappings X --f Y ,one with the smallest maximal dilatation. He gave a complete solution t o this problem. He showed the following result. --f
T h e o r e m 4.2.3 (Teichmuller extremal m a p p i n g t h e o r e m ) Let X and Y be compact Riemann surfaces of genus g > 1 and f : X Y a honieomorphism. There exists always a unique quasiconformal mapping F :X Y such that the following holds: --f
0
0
F is homotopic to the mapping f . I f g : X + Y is a Ii,-quasiconformal mapping and homotopic to f , then I(9 2 I<,, where I ~ is F the maximal dilatation of F . If Kg = K F , then also g = F .
Teichiniiller gave also an explicit description of the geometry of such an extremal mapping F . The most delicate part of this result is the uniqueness of the extremal mapping. Detailed proofs for the above results of Teiclimiiller can be found, for instance, in [60, Chapter V.]. Observe that non-classical surfaces are not usually considered in this context but the above result holds also for them. In other words we have: A homotopy class of a homeomorphism between compact non-classical compact Riemann surfaces of genus g > 1 always contains a unique quasiconformal mapping having the smallest maximal dilatation. It is out of the scope of the present monograph t o prove these results. A clear exposition can be found, for instance, in the monograph of Olli Lehto [GO]. Observe that, in the above theorems, the uniqueness part is not anymore true if we drop the assuinption g > 1.
4.3
Teichmuller spaces of Klein surfaces
There are many alternative definitions for the Teichmuller space. In these sections we will discuss some of these equivalent definitions.
4.3. TEICHMULLER SPACES OF K L E l N SURFACES
145
In certain cases it is convenient t o consider CDo-surfaces C instead of topological surfaces. In regard of the moduli problem this does not imply any restriction of generality since a topological surface always has an infinitely differentiable structure and any two such structures of a surface are isomorphic (as Coo-structures). So we feel free t o make, at this point, the assumption that C is a Coo-surface rather than just a topological surface. Let C be a fixed compact Coo-surface. T h e surface C need not be orientable, and it may have a non-empty boundary. If C is orientable, then we assume also that it is oriented. For an oriented surface C, let M ( C ) denote the set of those complex structures of C which agree with the orientation and the differentiable structure. For a non-orientable surface C the set M ( C ) consists of dianalytic structures of C that agree with the differentiable structure. Next we consider the group Diff( C) consisting of diffeomorphic selfmappings of C. Diff(C) acts on M ( C ) in the following way. Let f : C + C be a diffeomorphism and X E M ( C )a complex structure of C. T h e complex structure f * ( X ) of C is defined by requiring the mapping
f : ( C , f*(X))
+
(C7-q
(4.8)
be dianalytic. More precisely, if C is oriented and f orientation preserving, then the mapping (4.8) has t o be holomorphic. For orientation reversing mappings f, (4.8) is antiholomorphic. If C is non-orientable, then the mapping (4.8) has t o be dianalytic. It is immediate that, in all cases, these conditions determine uniquely the analytic structure f * ( X ) E M ( C ) of C. This is how a diffeomorphism f : C + C induces a mapping f" : M ( C ) +
M ( nx
f"(X).
Use the notation Diffo(C) = {f E Diff(C)l f homotopic to theidentity}. The group Diffo(C) acts freely on M ( C ) . That fact is one justification for the following definition.
Definition 4.3.1 (of Teichmuller spaces) The set theoretic quotient T ( C ) = M(C)/Diff,(C)
is the Teichmuller space of the surface C. We use also the notation T9 for the Teichmiiller space of a genus g surface C. Observe that hoinotopic self-mappings of an oriented surface are simultaneously orientation preserving. Consequently, if C is oriented, then Diffo(C) is a subgroup of the group Diff+(C) of orientation preserving diffeomorphic self-mappings of C.
146
CHAPTER 4. TEICHMULLER SPACES
Definition 4.3.2 (of the modular group) For an oriented surface C,the group r(C ) = Diff+(C)/Diffo( C ) is the modular group or the mapping class group of the surface C. For non-orientable surfaces C the modular group is defined setting r(C) = Diff(C)/Diffo( C ) . W e use also the notation I? for the moduhr group of a genus g surface C . Definition 4.3.3 (of the moduli space) For an oriented surface C, the quotient M ( C ) = M(C)/Diff+(C) is the moduli space The moduli space of u non-orientable surfuce C is M ( C ) = M(C)/Diff(C). W e use also the notation Mg for the moduli space of a smooth genus g surface C .
.
It follows from the above definitions that the modular group acts on the Teichmuller space, and that M ( C ) = T ( C ) / r C). ( An orientation reversing self-mapping f of C induces, likewise, a mapping f* : T ( C )+ T ( C ) ,[XIH [ f * ( X ) ] where , the analytic structure f * ( X ) of C is defined requiring (4.8) be analytic. The above definitions could as well have been given in terms of hyperbolic metrics of C. In the analytic definition of the Teichmuller space we identify two analytic structures of a surface C if the homotopy class of the identity mapping of C contains a dianalytic mapping. In the geometric definition for Teichmuller spaces we identify two hyperbolic metrics of a given surface C if the homotopy class of the identity mapping contains an isometry between these two metrics. Let X , Y E M ( C ) be two analytic structures of a fixed compact surface C. By Theorem 4.2.2 there are quasiconformal mappings (C, X ) + (C, Y ) homotopic to the identity mapping of C. For such a quasiconformal mapping f, let K f denote the maximal dilatation o f f . Definition 4.3.4 (of the Teichmuller metric) The distance between two points [XI and [ Y ]of the Teichmiiller space T(C ) in the Teichmuller metric T of the T(C ) is defined b y
The Teichmiiller space T ( C ) together with the Teichmuller metric is homeomorphic t o an Euclidean space ([60, Theorem 9.2, page 2411). This is one of the deep consequences of the Teichmiiller extremal mapping theorem that cannot be presented in this monograph. We refer to Chapter V of the monograph of Olli Lehto ([60]) for a complete and detailed treatment of this aspect of the theory of Teichmuller spaces. We observe, nevertheless, tha.t the elements of the modular group r ( C ) are isometries of the Teichmuller metric. This is an immediate consequence of the definitions. Hence they are, in particular, homeomorphic self-mappings of the Teichmuller space.
4.4. SPACES OF B E L T R A M I D l F F E R E N T l A L S
4.4
147
Teichmuller spaces of Beltrami differentials
By Theorem 4.2.1 we can associate, t o each Beltrami differential p of a Klein surface X , a Klein surface X,. Consequently, Teichmiiller spaces can be defined also in terms of Beltrami differentials. To be more precise, choose a point [XI E T ( C ) ,which we will refer t o as the origin of the Teichmiiller space. Consider the space B e l ( X ) of Beltrami differentials of X . Each p E B e l ( X ) defines a unique X , E M ( C )such that the identity mapping of C is a p- quasiconformal mapping X -+ X,. We say that two Beltrami differentials p1 and p2 of X are equivalent, p1 x p 2 , if the homotopy class of the identity mapping of C contains an isomorphism (C,X,,) + ( ~ 7 X P 2 ) .
Definition 4.4.1 The set T ( X ) = B e l ( X ) / M is the Teichmiiller space of Beltrami differentials of X . It is an immediate consequence of these definitions that
is a bijection between these two Teichmiiller spaces. The Teichmiiller metric of T ( X ) is the pull back of the Teichmiiller metric of T ( C )under the mapping (4.9).
Theorem 4.4.1 Teichmuller space T ( X ) is connected. Proof. Let p represent an arbitrary point of T ( X ) . Then t H [ t p ]is a path connecting the point [p] to the origin of T ( X ) . Note that this path depends on the choice of p ([102]). Lars Ahlfors showed as early as in 1959([5]) that, for an orientable surface C without boundary, the Teichmiiller space T ( C )has a natural complex structure and is a complex manifold. The construction of Ahlfors was based on considering periods of Abelian differentials. It is not possible to present it here. We will, however, describe a way to decide which functions are holomorphic on T ( C ) . Let us assume now that C is a compact and oriented surface without boundary. It is convenient to consider the Teichmiiller space T ( X ) of Beltrami differentials of X instead of T ( C ) . Let x : B e l ( X ) + T ( X ) be the projection. This is a continuous mapping with respect to the Loo-metric on B e Z ( X ) and the Teichmiiller metric on T ( X ) (cf. e.g. [GO, 111.2.21). Hence, for any open U c T ( X ) , x - ' ( U ) is open in B e l ( X ) .
148
CHAPTER 4 . TEICHMULLER SPACES
Holomorphic functions on T ( X ) . Let U C T ( X ) be open. We declare a function f : U + C holomorphic if the composition f o ?r is a holomorphic function on the open set .-’(U) of the complex Banach space of (-1,l)-differentials of X. In this way T ( X )becomes first a ringed space. It is not, a priori, clear that the above definition actually gives a good complex structure on T ( X ) . That is, however, the case if C is an oriented surface which does not have boundary (cf. e.g. [60, Chapter V]). This complex structure of T ( X )is then transformed to a complex structure of T ( C )requiring the mapping (4.9) be holomorphic. We still have to check that this complex structure of T ( C ) does not depend on the choice of the origin X of the Teichmiiller space T ( C ) . But that is an immediate consequence of the transformation formula ( 2 . 8 ) and the remark made after it. It is a rather straightforward verification that the elements of the modular group are biholomorphic automorphisms of the Teichmiiller space. Royden has shown' ([Yl, Theorem 1 on page 2811 and [72, Theorem 2 on page 379]), in fact, that for surfaces of genus g > 2 , r ( C ) is the full group of holomorphic automorphisms of l ' ( C ) . In the same way we verify that the mapping u* : T ( C )-t T ( C ) , induced by an orientation reversing mapping (T : C -, C (cf. formula (4.8)), is an antiholomorphic self-mapping of the Teichmiiller space (for details see [74, 5.101). For a later reference we formiilate these results as follows:
Theorem 4.4.2 The Teichmuller space of compact genus g Riemann surfaces is a complex manifold of complex dimension 39 - 3. The elements of the modular group P are holomorphic automorphisms of Tg. For g > 2, r g is the full group of lioloniorpltic uutomorphisms of Tg . This result can be extended to general finite dimensional Teichmiiller spaces of oriented surfaces without boundaries. For a careful proof of this result we refer to the monograph of F. W. Gardiner [32, 9.21.
4.5
Non-classical Klein surfaces
If C has a non-empty boundary or if it is non-orientable, then T ( C ) is not a complex manifold. In this case the Teichmiiller space is, in a natural way, a real analytic manifold. This real analytic structure can be obtained from the complex structure of Teichmiiller spaces compact Riemann surfaces. To this end a topological construction is necessary. 'Clifford Earle has recently found a new proof for this result of Royden.
4.5. NON-C LA SSICA L K L EIN S URFACES
149
Assume that C is a compact surface which either is not orientable or has a non-empty boundary (or both). Recall the definition of the complex double, C", of the surface C (see page 77). C" is a compact oriented surface without boundary together with a projection K : C c + C that is a ramified double covering mapping. It is ramified precisely a t the points lying over the boundary points of C. T h e covering group of ?r is generated by an orientation reversing involution u of Cc for which ?r o u = 7r. The fixed point set of the involution u corresponds to the boundary points of C. Above we have observed that the mapping n : C" + C c induces an antiholomorphic self-mapping o* of T ( C"). This mapping is an involution since u is an involution. For any X E M ( C ) let 7r*(X) be the complex structure of C c which agrees with the orientation of C c and for which the projection 7r
: (C", .*(X))+ (C, X )
is dianalytic. It is immediate that 7r*
: T ( C ) + T ( C " ) [XI , H [7r*(X)],
is a well-defined mapping of Teichniiiller spaces. It is not difficult t o show that the mapping x* : T ( C ) + T ( C " ) is an isometry with respect t o the corresponding Teichmiiller metrics. IIence it is, in particular, a homeomorphism of T ( C )onto r * ( T ( C ) ) . Theorem 4.5.1 Assume that C is a non-classical surface of genus g , g 1. We have n * ( T ( C ) )= T(C"),*
>
Proof. Let X be a complex structure of C. T h e complex structure ?r*(X) of C c has the (defining) property that n : ( C " , r * ( X ) )-, ( C " , ? r * ( X ) is ) an antiholomorphic involution. This implies that
[ n * ( X ) ]E T(C"),*, i.e. that r*(T(C)C T ( C C ) , * . To prove the converse inclusion, take a point [ Y ] E T(C"),*. By the definition this means that there is a holomorphic mapping f : ( C " , Y ) + ( C " , u * ( Y )which ) is homotopic t o the identity mapping of C". (Recall that u*(Y)is defined as that complex structure of Cc for which the mapping u : ( C " ,u * ( Y ) )-+ ( C " ,Y ) is antiholomorphic.) The construction implies that T = u o f : ( C " , Y )+ (C",Y)is an antiholomorphic mapping. Then T * : ( C " , Y )+ ( C " , Y ) is a holomorphic
CHAPTER 4. TEZCHMULLERSPACES
150
mapping. Since u is an involution and f is homotopic to the identity, we conclude that T is also homotopic to the identity. Since the genus of the Riemann surface ( C " , Y )is at least 2, the only holomorphic automorphism of (C", Y ) that is homotopic to the identity is, by Lemma 3.6.8, the identity itself. This implies that T : (C",Y) ( C " , Y )is an antiholomorphic involution proving the theorem. For a surface C that is either non-orientable or has a non-empty boundary (or both) we now identify T ( C )with its image n*(T(C))= T(Cc),* in T ( C C ) Since . (T* is an antiholomorphic involution of T ( C C )its , fixed-point set, r * ( T ( C ) )is, a real analytic manifold.
4.6
Teichmuller spaces of genus 1 surfaces
Classical and non-classical compact genus 1 Riemann surfaces are: 0
torus,
0
annulus,
0
Klein bottle,
0
Mobius band.
Last three are non-classical and their complex double, in all cases, is the torus. By Theorem 4.5.1 we can interpret the Teichmiiller space of these non-classical surfaces as a subset of the Teichmiiller space of the torus. In this case the Teichmuller space is quite well known. To motivate later constructions we will, in this Section, review the classical theory concerning the Teichmiiller spaces of genus 1 surfaces. Recall considerations related to the Riemann Mapping Theorem 3.6.1 on page 8G: the universal covering surface of a torus T' is the finite complex plane C . The covering group G is generated by two translations gl(z) = t + w1 and 92(z) = z w2. Let T = w1/w2. The quotient C / G is a compact genus 1 surface if and only if T is not real. Without loss of generality we may then assume that I m r > 0. This representation for a torus is called no rnia lized. Let T' be a topological oriented torus, and let X be a complex structure on it which agrees with the orientation. The fundamental group nl(T', P) of T' at a base-point P E T' is generated by homotopy classes of two simple closed curves a and /3 (see Fig. 4.2). Let X and X' be two complex structures of T' which agree with the orientation. Let ( T ' , X ) = C / G and ( T ' , Y ) = C/G', where G is generated
+
151
4.6. T E I C H M U L L E R SPACES O F G E N U S 1 SURFACES
Figure 4.2: The fundamental group of a torus is generated by the homotopy classes of two simple closed curves. by z H z + w 1 , z H z + w 2 and G' is generated by z H z + w i , z H z + w i . Without loss of generality we may assume that z H z w1 and z I-+ z w i both cover the homotopy class of Q and z H z w2, z H z w i cover that of /3. This means that the identity mapping ( T ' , X ) + ( T ' , X ' ) induces the isomorphism G + G' which takes z H z w1 onto z H z w { and z H z w2 onto z H z w:. Assume now that X and X ' determine the same point in the Teichmuller space T ( T ' ) of the torus T'. This means that there is a holomorphic homeomorphism f : ( T l ,X)+ (T1, X I ) which is homotopic t o the identity mapping of 7’’. By Lemma 3.6.7 (page 92) this means that f has a lifting F : C + C which induces the same isomorphisms as the identity mapping. The mapping F is now of the form F ( z ) = az b, where a # 0. The condition that it induces the same isomorphism as the identity mapping simply means that
+
+
+ +
+
+
+
+
+
Since a
# 0, equations (4.10) yield
This means that the mapping
T(T1)-+
u, [XI H
W1
- =: 7
w2
(4.11)
is a well defined mapping. Reversing the above argument shows that it is also injective and onto. We have, therefore:
CHAPTER 4 . TEICHMULLERSPACES
152
Lemma 4.6.1 The Teichmiiller space half-plane U .
T(T’)
of a torus
T’ is the upper
By the criteriuin characterizing the complex structure of T(T') (on page 148) it is immediate that the ma.pping (4.11) is a holomorphic homeomorphism. We may, therefore, identify the Teichmiiller space of a torus by the upper half-plane. Let C be a non-classical compact Riemann surface of genus 1. Then C may be expressed as a quotient C = T’/(o),
where u : T'
T' is an orientation reversing involution. The mapping (T : T' -, T' induces an antiholomorphic involution (T* : T(T1) -+ T( T') , i.e., an antiholomorphic involution u* : U + U of the upper half-plane. A closer analysis reveals that we may assume that u* is one of the --+
following involutions of the upper half-plane: 1. ff*(z) = -2.
2.
ff*(z) =
l/Z
3. fY*(z) = -z+ 1.
The first involution corresponds to the annulus and to the Klein bottle. The two following involutions correspond to the Mobius strip. Here we have the phenomena that the images of Teichmuller spaces of two non-classical genus 1 surfaces C and C' agree in the Teichmuller space of their common complex double, namely the torus. This does not happen in the case of Teichmuller spaces of surfaces of genus 9 , 9 > 2.
4.7
Teichmuller spaces of reflection groups
Points of the Teichmuller space of a surface C are equivalence classes of dianalytic structures on C. Choosing an origin X = ( C , X ) for the Teichniuller space, we can view its points as quasiconformal deformations of the Klein surface X corresponding to the origin. Via the Uniformization this can be transformed t o groups. We use the standard notations: G L ( 2 , R )is the group of real 2 x 2-matrices with determinant # 0, P G L ( 2 , R ) is the group of holomorphic or antiholomorphic automorphisms of the upper half-plane, SL(2, R) is the group of real 2 x 2-matrices with determinant +1, and P S L ( 2 , R ) is group of Mobiustransformations mapping U onto itself. Every reflection group G is a discrete subgroup of P G L ( 2 , R ) .
4.7. SPACES OF REFLECTION GROUPS
153
Figure 4.3: Teichmiiller spaces of non-classical genus 1 Riernann surfaces as subsets of the Teichmiiller space of a torus. Assume now that G C PGL(2,R) is a fixed reflection group representing the origin [XI of the Teichmiiller space.
Definition 4.7.1 T h e deformation space R o ( G ,PGL(2,R)) = R o ( G ) of G in P G L ( 2 , R ) is the space of a11 injective homomorphisms 6 : G + P G L ( 2 , R ) such that 6(G) is discrete and the Klein surfaces U/ G and U/O(G) w e quasiconformally equivalent. The condition about quasiconformal equivalence simply means that the Klein surfaces U/G and U/O(G)have t o be of the same type, for instance homeomorphic compact surfaces or interiors of mutually homeomorphic compact Klein surfaces with boundary. T h e deformation space R O ( G )is a subset of the space R ( G ) of all homomorphisms of G into PGL(2,R). Both these spaces are subspaces of PGL(2,R)G which carries the product topology. This topology induces a topology on Ro(G)and on R ( G ) . Every isomorphism 6 : G -+ B(G) C P G L ( 2 , R ) defines a Klein surface X e = U/6(G)which is homeomorphic t o X = U/G. By a theorem of Nielsen all such isomorphistns 6 are geometric, i.e., there exists a homeomorphism 'p : X --f Xe which induces the isomorphisiii 6.
Definition 4.7.2 Two isomorphisms Oj : G -+ Oj(G),j = 1,2, are equivalent, 6, NN 82, i f O , 06;' is the restriction to & ( G ) of an inner automorphism
CHAPTER 4. TEICHMULLER SPACES
154
of PGL(2, R). The quotient T ( G )= Ro(G)/zz is the Teichmuller space of the group G.
Recall that we started with a surface C of genus g , g > 1, and chose an origin X = (C, X ) for the Teichmiiller space and fixed a reflection group G such that X = U/G. Let B : G --t B(G) be an isomorphism representing a point in T ( G ) .The above mentioned Theorem of Nielsen together with Theorem 4.2.2 implies that there is a quasiconformal mapping f : X + U/B(G) which induces the isoinorphisiii 8 in the sense of Definition 3.6.3. Let p be the complex dilatation of f. By Theorem 4.2.1 the Beltrami-differential p defines a complex structure X, of C such that the identity mapping (C, X) + ( C , X , ) is p-quasiconformal. Theorem 4.7.1 The formula
A :T(G)
+
W )[el ,
[X,l
defines a bijective mapping between the two Teichmzlller spaces. Proof. Let us first show that A is a well defined mapping. To that end let 01 and 02 be equivalent isomorpliisms of G. Let fj : X -+ U/Bj(G)be a pj quasiconformal mapping inducing B j , j = 1,2. We have to show that the homotopy class of the identity mapping of C contains a dianalytic mapping (C,X,,) ( X J P 2 ) . Since O1 is equivalent to 02 there exists, by the definition, an element t E PGL(2,R) such that +
el(g) = t
s,(g) o t-l
holds for all g E G. By Lemma 3.6.7 we conclude that f1 o fp' is homotopic to a mapping h : U/B,(G) -+ U/B,(G) which is either conformal or ant iconformal. We need more notation. For j = 1,2, let Ij : ( C , X ) + (C,XPj)be the identity mapping. These mappings form the following diagram.
(4.12)
4.8. PARAMETRlZATION OF TEICHMULLER SPACES
155
Since h x f1 o f;', fr' o h o f 2 is homotopic t o the identity mapping of C. Consequently, Q is homotopic t o the identity as well. Since I j : ( C , X ) + ( C , X P j )and f j : ( C , X ) + U/Bj(G) are both pj- quasiconformal, j = 1,2, the mappings I1 o and f2 o 1;' are both conformal by the uniqueness of quasiconformal mappings (cf. page 65). It follows that Q : ( C , X , , ) + (C, X P l )is a conformal or anticonformal mapping homotopic to the identity. This proves that the mapping A is well defined. Let us next prove that A is injective. To that end suppose that e j : G + Bj(G),j = 1,2, are two isomorphisms such that A([&]) = A([&]). Let f j : X + U/Bj(G) be the p j - quasiconformal mapping inducing 0,. As above, let I j : ( C , X ) + (C,XPi) be the identity mapping of C. These mappings form again the diagram (4.12). Since A([&]) = A([&]), Xl1 and XP2define the same point in the Teichmiiller space. Hence the homotopy class of the identity mapping contains a dianalytic mapping Q : (C,X,,) + (C,Xp1). Consider the mapping
fr’
fi o
1;'
0
Q 0 I2 o
f;’: U / & ( G )+ U/81(G)
(4.13)
By the uniqueness of quasiconformal mappings, the mapping (4.13) is dianalytic. Its lifting to the upper half-plane is a dianalytic mapping which conjugates & ( G ) to &(G). This argument shows that the isomorphisms 01 : G --+ &(G) and 8 2 : G + &(G) are equivalent. Hence the mapping A is injective. We still have to show that A is surjective. To that end, let [ Y ]E T(C) be an arbitrary point of T ( C ) . Then there exists a Beltrami differential p of X such that [X,] = [Y]. This Beltrami differential lifts to a Beltrami differential of the reflection group G , X = U/G. We denote the lifting of p also by the same symbol. Let f,: U + U be a p-quasiconformal self mapping of the upper half-plane. Then tJ : G + B(G) c PGL(B,R),g H f,ogof;' determines a point in T ( G )which maps to [ Y ]under the mapping A. Hence A is surjective.
4.8
Parametrization of Teichmuller spaces
We will now apply the machinery developed in Chapter 1 to Teichmiiller spaces. Let us first consider orientable surfaces and their Teichmuller spaces only. So we assume now that C is an orientable surface without boundary. Choose an origin [XIfor the Teichmiiller space and a Fuchsian group G such that X = U/G. Since C is orientable we may assume that G c PSL(2, R) and consider an isomorphism tJ : G + B(G) c PGL(2,R). The group B(G) acts on
156
CHAPTER 4. TEZCHMULLER SPACES
the upper half-plane - its elements are holomorphic or antiholomorphic automorphisms of U . Assume that 8(G) contains both holomorphic (other than the identity) and antiholomorphic automorphisms of U , i.e., that B(G) is a proper reflection group. We show that this is not possible. The elements of G, save the identity, do not have fixed-points in U. By Nielsen’s theorem B(G) is a geometric deformation of G. Hence the elements of B(G) do not have fixed-points in U either. We assumed that B(G) is a proper reflection group. The above remark implies then that U/O(G)is not orientable. But that is not possible since U/O(G) is homeomorphic to U/G which is orientable. This argument shows that as self-mappings of U the non-identity elements of B(G) are all either holomorphic or antiholomorphic. But a group B(G) E P G L ( 2 , R ) containing antiholomorphic self-mappings of U contains also holomorphic self-mappings of U . We conclude that when starting with an orientable surface C each representation B : G + P G L ( 2 , R ) satisfies B(G) E P S L ( 2 , R ) . This shows that when considering Teichmuller spaces of orientable surfaces we may replace P G L ( 2 , R) by PSL(2, R)in the construction of T ( G ) . Let us do this. We assume that the classes of all possible pairs ( g , h ) of transformations of G are known. This is actually a topological condition: the class of a pair ( y , h ) is determined by the corresponding pair of elements of the fundamental group of C. Let B : G + P S L ( 2 , R ) be a deformation of the group G. Recall that, by the above remark, all points of T ( G ) can be represented by deformations of G into P S L ( 2 , R ) . The following result has been presented already in Chapter 1 (Theorem 1.4.2 on page 28). Here we give a new proof which applies the theory of quasiconformal mappings. Lemma 4.8.1 Let ( 9 ,h ) be a poir of elements of G whose class is defined. Then also the class of the pair ( O ( g ) , 8 ( h ) )is defined and is the same as the class of the puir (y, 11).
Proof. The class of a pair of hyperbolic Mobius-transformations is defined whenever the transformations do not have fixed-points in common. It is clear that if g and h do not have common fixed-points then neither d o @(g) and B ( h ) . Hence the statement about the classes being defined is apparent. Recall that, by Nielsen’s theorem, every isomorphism 8 : G + B(G) is geometric, i.e., is induced by a quasiconformal mapping U/G + U/B(G). Let p be the complex dilatation of that mapping. Lift it t o a Beltrami U be a p-quasiconformal differential p of the group G. Let f , : U --f
4.8. PARAMETRIZATION OF TEICHMULLER SPACES
157
mapping of U onto itself normalized in such a way that f, fixes 0, 1 and 00. Then the isomorphism 8 is equivalent to g H f, o g o The class of a pair of Mobius-transformations is not affected by conjugation. Hence the classes of the pairs
fF1.
are the same. Therefore it suffices to prove that the classes of ( g , h ) and (g,, h,) are the same. For each t , 0 5 t 5 1, consider the Beltrami-differential t p of the group G. Let ft : U 4 U be the tp-quasiconformal mapping of U onto itself normalized in such a way that it fixes 0, 1 ancl 00. Then each ft induces an isomorphism 8t : G + 8t(G),g++ ft o g o
fr’.
The group G acts freely on U . Hence also all the groups &(G)= ftGfL1 act freely on U . It follows that none of the groups &(G) contain elliptic transformations. We conclude that each pair ( O t ( g ) ,& ( / a ) ) belongs either to P or to 3-1. The fixed points and the multipliers of 8 t ( g ) and & ( h ) are continuous functions o f t . Clearly also & ( g ) = g and &(h) = h. We conclude, by the definition of the classes P and 3-1 (see page 24), that the class of &(g), B,(h)) equals that of ( g , h ) for each t , 0 5 t 5 1. In particular, the class of ( 8 , ( g ) , B l ( h ) ) is the same as the class of (9, IL) proving the lemma. Consider the set Ic generating G and satisfying the relation (3.8, page 89). It is a simple matter to check that K: satisfies the technical conditions of Lemma 1.6.3 on page 44. Also any deformation 8 ( K ) = {8(f)l f E Ic} of K satisfies those conditions. We will apply the consideration of Section 1.6 to this set Ic. Let f1, .. .,fGp-4 be the elements of G whose multipliers determine K up to a conjugation by a Mobiu-transformation. We can find these elements by Lemma 1.6.3 (page 44). Recall that we have fixed an isomorphism n l ( C , Q ) -+ G. Let 01,.
.
* 7
QGp-4
be the closed curves of C corresponding to the elements Let
f1,.
. . ,fGp-4.
L : T ( G )+ R7-4, [ G A 8 ( G ) ]H (logk(d(fI)),. . .,logL(B(fq,--4))). We use here the notation of Chapter 1: k ( e ( f j ) ) is the multiplier of the Mobius-transformation 8(fj). Lemma 1.6.3 (page 44) implies now:
CHAPTER 4 . TEICHMULLER SPACES
158
Theorem 4.8.2 The mapping 6p-4 C : T ( G )+ R+
is injective.
4.9
Geodesic length functions
It is worthwhile to rephrase the above deliberations for the Teichmiiller space T ( C ) of a fixed surface C. Above we considered only the case of F'uchsian groups or the case of an oriented and compact surface C without boundary. That was done for mere technical convenience. Everything said here applies also to the more general case of surfaces of finite type. Let a be a closed curve on C representing an element of the fundamental group ?rl(C,Q) of C at a point q E C. Let X be a complex structure of C. Use the notation L,(X) = inf(1engthofPonXI phomotopictocr}. It is straightforward to check that (4.14)
is a well defined function on T(C).
Definition 4.9.1 Functions of type tions.
(4.14) are called geodesic length func-
We show next that geodesic length functions are continuous following the argument of [89, Theorem 4.11. Consider hyperbolic transformations g and g' which are conjugate under an orientation preserving homeomorphism f : & + i.e.,
e,
g'
=f
0
g
0
f-1.
If f is conformal, then k(g’) = k(g). We show next that the multiplier k(g) is quasi-invariant under quasiconformal mappings. L e m m a 4.9.1 I f f is I<-quasiconformal and g' = f
o
g o f-l, then (4.15)
Proof. Denote k = k(g) and k’ = k(g’). We may assume that g ( z ) = kz and = k'z. Since (9’)" = f o gn o f-*, we have
g'(z)
(4.16)
4.9. GEODESIC LENGTH FUNCTIONS
159
for R. = 0,f l ,f2,.... Let B, be the annulus bounded by the circles 1.1 = 1 and 1.1 = Ic", n = 1 , 2 , . . .. We approximate the ring domain Bk = f ( B , ) by an annulus B$ as follows. Let = min lf(e")I 79
Then
<1
> 0 and 52 c 00
t2= rnda lf(e")].
and we set
B:: = {.It1 Then by (4.16), Bk of B,N, we have
and
c Bt.
<1.1 < (k')Y21.
Since, Bk separates the boundary components
M(&)
5 M(B:) = l o g 9 = nlogk'+loge.
Here M ( B ) denotes the modulus of the ring domain B as defined by Definition 2.2.4 (page 60). On the other hand, since f is IC-quasiconformal,
So we have log k
5 IC log k'
II I$ +log 2,
n I$1 00, we conclude that log k 5 K log k'. Similarly, replacing and, letting n f by f - l , we can conclude that log k' 5 IClog k.
Theorem 4.9.2 Geodesic length functions are continuous with respect to the topology induced by the Teichmuller metric.
Proof. Let X be a complex structure on C representing a point in the Teichmiiller space. Let a be a closed geodesic curve on C that is not homotopic t o a point. Consider the geodesic length function e, at the point
[XI E T ( W Write X = U / G for some Fuchsian group G. Assume that the Mobius transformation g E G covers the homotopy class of a. Let k = k(g) be the multiplier of g. By the considerations on page 107 related to Theorem 3.12.1 e,([xl)= log k. Let Y be another complex structure of C and let ( C , Y ) = U/G' for a Fuchsian group G'. Let f : ( C , X ) + ( C , Y ) be a K-quasiconformal
CHAPTER 4. TEICHMULLER SPACES
160
mapping homotopic to the identity mapping of Z. Let F : U + U be a lifting of f . Since g E G covers the homotopy class of the curve a and since f is homotopic to the identity, also F o g o F-' E G' covers the homotopy class of a, Let k = k ( g ) and k’ = k(g’) be the corresponding multipliers. By Lemma 4.9.1 we have: -1< - logk < K (4.17) K - log k’ Taking the logarithms we get, from (4.17),
I log(1og k) - log(1og k’)] _< log K ,
(4.18)
11% &2([Xl)- 1% U Y I > I I 1% K.
(4.19)
i.e., Inequality (4.19) is valid for all Zi’ that are maximal dilatations of quasiconformal mappings f : ( C , X ) + (C,Y) homotopic t o the identity. In view of the definition of the Teichmiiller metric T (Definition 4.3.4 on page 146) (4.19) implies that
11% W X l ) - log~*([YI)I5 W X I ?[Yl). The geodesic length function
e,
is therefore continuous.
Using the description of the complex structure of the Teichmiiller space given on page 148, we can show even more:
Theorem 4.9.3 Geodesic length functions are real analytic.
Proof. Choose an origin X for t lie Teichmiiller space T (C) and a Fuchsian group G with U / G = X. Fix an isomorphism K ~ ( C , Q--*) G and let g E G be the Mobius-transformation corresponding to a. As in the above, l,(.Y)
= log k ( g ) .
Let p be a Beltrami differential representing an arbitrary point of T ( X )the Teichmiiller space of Beltrami differentials on X. In view of what is said about the complex structure of T ( X ) it suffices to show that B e W R,, P ~ m ( X , > , -+
is a real analytic mapping of the open unit ball in the complex Banach space of (- 1, I)-differentials of X . The identity mapping Z, : ( C , X ) .+ ( C , X , ) is a p-quasiconformal mapping. Lift the Beltrami-differential p of X to a Beltrami-differential
4.9. GEODESIC LENGTH FUNCTIONS
161
p of the Fuchsian group G. Let f, be the p-quasiconformal self-mapping
of U normalized in such a way that f, keeps 0, 1 and 00 fixed. Then G, = fpG(fp)-' is a Fuchsian group with X , = U/G,. The projection U t Xubeing defined in such a way that the diagram
commutes. In other words, U + Xf is the universal covering of X,, the covering projection is I,, o ?r o (f,,)- where ?r : U + X is the projection U ---f X and the covering group is G, = f,Gf;'. The element g E G covers the curve (Y on X. Consequently, the element f, o g o f ;’covers the curve a on X,. Then, repeating the above considerations related to Theorem 3.12.1, (4.20)
The right-hand side of (4.20) depends real analytically on p E Bel(G). This is a consequence of an important result in the theory of quasiconformal mappings according to which a quasiconforinal mapping depends holomorphically on its complex dilatation. Here it is not possible to go into the details in this matter. For a detailed discussion we refer to [60, 5 3.2., pp. 69 - 721 and to references given there. Hence, in view of the definition of the complex structure of T ( C ) ,la is a real analytic function. We conclude this cliapter observing that identifying T ( C ) with T ( G ) the parametrization C for T ( G ) is actually a parametrization of T ( C ) by geodesic length functions. Furthermore, L is real analytic. Here we have considered only orientable compact surfaces without boundary. Surfaces with boundary and non-orientable surfaces can be treated by the above methods passing first to their complex doubles. We shall not do it here. For details see [go]. Consider the image C ( T ( C ) )of the Teichiniiller space in R7-4.Each point of T(C) is an equivalence class of complex structures of C or an equivalence class of hyperbolic iiietrics. Let us now use the latter interpretation. It is of interest to try to see what happens to the metric as we approach the boundary of C ( T ( C ) )in R"+"-". Theorem 3.19.1 is our main tool in studying the possible ways of degeneration of Riemann surfaces. That will be the main topic of Chapter 5.
CHAPTER 4. TEZCHMULLERSPACES
162
4.10
Discontinuity of the action of the modular group
In this Section we take a closer look at the action of the modular group on the Teichmiiller space. We start with some rather obvious technical results. Consider the Teichmiiller space T ( C )of a compact surface of genus g > 1. Let G c r ( C ) be a finite subgroup of the modular group. Lemma 4.10.1 If [XIE T ( C ) is fixed by alt elements of G , then G is a quotient of the automorphism group of the Riernann surface X .
Proof. This rather obvious by the definitions and by the fact that the homotopy class of a homeomorphic self-mapping of a compact Riemann surface of genus > 1 contains at most one automorphism. We usually have G = Aut(X). In the case of genus 2 Riemann surfaces this is not, however, true. In that case there is an orientation preserving involution s : C + C, which is not homotopic to the identity but induces, nevertheless, trivial self-mapping of the Teichmiiller space. This reflects the fact that all genus 2 Riemann surfaces are hyperelliptic, i.e., they admit an orientation preserving holomorphic involution. Lemma 4.10.2 Assume that [X,] is a converging sequence of points of the Teichmiiller space T ( C ) of a surface C, whose Euler chamcteristic is negative. Let a be a closed curve on C that is not homotopic to a point and
let e, : T ( C )+ R denote the corresponding geodesic length function. Then the sequence e,(X,) converges to a finite limit.
Proof. This is obvious and follows from the continuity (Theorem 4.9.2, page 159) of the geodesic length function (which is actually real analytic). From the definitions it follows immediately that the elements of the modular group P = r ( C ) of a genus g , g > 1, surface C are homeomorphic self-mappings of the Teichmiiller space Tg = T ( C ) and isometries of the Teichmiiller metric T . This does not require any proof. The modular group acts on the Teichmiiller space. Lemma 4.10.3 Let f,* E r(C) be elements of the modular group and let [XIE T ( C ) be a point in the Teichmtiller space. Then the length spectrum &( f , * ( X ) ) of a Riemann surface representing the point f ; ( [ X ] ) does not
depend on the element f,*E r(C).
4.10. ACTION OF THE MODULAR GROUP
163
Proof. This is also obvious by the definition of the action of the modular group. Recall that an orientation preserving diffeomorphisms f : C -+ C induces first a mapping (cf. formula (4.8) on page 145) f* : M ( C ) -+ M ( C ) where f * ( X ) ,for a complex structure X , is defined by requiring the mapping f : (C, f*(X)) -+ ( C , X ) be an isometry of the corresponding hyperbolic metrics. This means that the set of lengths of closed geodesic curves on ( C , X ) and on (C, f*(X)) are equal (as sets).
Lemma 4.10.4 Assume that g > 1 . Orbits of points of T g under the action of the modular group P are discrete subsets of T g . This is a consequence of the discreteness of the length spectrum (Theorem 3.15.1, page 115). Assume the contrary. Then one can choose a point [XI E T9 and a sequence f; of distinct elements of the modular group in such a way that f,'([X]) converges to a point in Tg and all points f,'([X]) are distinct points of T9. Let us show that this is not possible. By Theorem 4.8.2 we can find a set ((~1,. . .,(YG9-4} simple closed curves on C such that the associated geodesic length functions form an injective mapping of the Teichmiiller space into R"+"-". Let L = C ( X ) be the length spectrum of X. By Lemma 4.10.3,
for each n. By Theorein 3.15.1, C is a discrete subset of R. By Lemma 4.10.2 the sequence e a J ( f , ' ( X ) )converges as n -+ 00 for each index j. Since all the values l a J ( f ; l ( X ) E) C(f ; ( X ) ) = C belong to the same discrete subset of R, convergence can happen only if for each j there is an index N j such that e a J ( f ; l ( X ) )is independent of n for n > N j . Let now NO = max(N1,. . ., N6g--4). Then, for n > NO,l a j f,*(X)) ( is independent of n for all j. Theorem 4.8.2 implies then that all the points !,*([XI) E T g agree which is a contradiction.o
Theorem 4.10.5 Assume that g > 1 . The action 0 f P on T discontinuous.
g
is properly
Proof. It clearly suffices to show that each point [XI E Tg has an open neighborhood U X such that:
f * ( U x )n Ux # group P.
0 for
at most finitely many elements f* of the modular
CHAPTER 4 . TEICHMULLER SPACES
164
To construct such a neighborhood
is a positive number. Here
T
Ux observe first that by Lemma 4.10.4
is the Teichmuller metric. Let
Since all elements of the modular group are isometries of the Teichmiiller metric, the definition implies that f * ( T x n ) Bx = 8 for all f* E r g not fixing the point [XI. By Lemma 4.10.1 and by Tlleorem 3.9.3 (page 99), there are at most S 4 ( g - 1) elements of r g fixing the point [XI proving the theorem. Here we have considered Teichmuller spaces of compact classical surfaces of genus > 1 simply for technical convenience. It is not hard t o see that the same holds for actually all compact surfaces. The case of classical genus 1 surfaces will be dealt with separately. Same arguments can be applied also in the case of non-classical compact surfaces. Theorem 4.10.5 was first shown by S. Kravetz [54]. The arguments presented here follow the lines of the presentation of F. P. Gardiner 132, Section 8.51.
4.11
Representations of groups
Teichiiiiiller spaces of Riemann surfaces can be studied also in a more abstract setting using representations of groups. That leads to an interesting parametrization of the Teichmiiller space of a classical Riemann surface as a coriiponent of un uflize reul ulgebruic variety. This approach is interesting also because it leads to new ways of compactifying the Teichmiiller space ([73], [64], [16]). Within this monograph we cannot present these compactifications. We can, however, show that the Teichmuller space is a component of an affine variety. This important result has been shown independently by several authors. To our knowledge the first one to do this was Heinz Helling ([39]). We follow his constructions here. At this point it is necessary to review results from the theory of deformations of representations of groups. We cannot prove everything here. For more details w e refer to [83], [97], [98] and [39]. The following notation and definition is related to Definition 4.7.1 (on page 153) but it is not exactly the same. Definition 4.11.1 Let I? be a group und F a topological group. The deformation space K ( r , F ) of r in F consists of all homomorphisms r + F .
4.11. REPRESENTATIONS OF G R O U P S
165
We endow R(r,F ) with the topology of point-wise convergence. In this topology a sequence formed of the homomorphisms Bj : r 4 F, j = 1,2,. ., converges to a homomorphism 0 : r F if and only if for each 7 E I' the sequence &(7),&(7),... converges to 6(y) in the topological group F . For a topological group F , Aut(F) is the group of all continuous automorphisms of F . We denote by Auto(F) the group of inner automorphisms of F. The group Aut(F) acts on R ( I ' , F ) in the natural way: an element f E Aut(F) induces the mapping ’f :R ( r ,F ) R(r,F ) defined by setting f*(0) = f o 6 for every B E R ( r ,F ) .
.
--f
-+
Definition 4.11.2 The quotient
7(r,F ) = R(r, F ) / A u t o ( q is called the Teichiniiller space of representations of ’I in F .
For a locally compact group F , let
Ro(r,F ) = (0
E
R(r, F
) I ~ injective, qr) discrete, F/o(r)compact).
The subspace R0(r,F ) is clearly invariant under the action of Aut(F). We use the notation I o ( r F , ) for the image of Ro(I',F ) in l ( r ,F ) under the projection R + 7. Definition 4.11.3 This space
P ( r ,F ) is called the Teichmiiller space of
discrete representations of
F.
r in
In certain special cases the space 'To(I?, F ) is closely related to the usual Teichmiiller space of a surface. To see the connection consider the fundamental group r (at soiiie implicit base point) of a compact and oriented surface C without boundary. Let X be a complex structure on C. By the uniforinization theorem we get a presentation X = U / G where U is the upper half-plane and G C PSL2(R) is a discrete subgroup, i.e., a Fuchsian group. This, in turn, gives rise to an isomorphism (3.6) (see page
87) 8 : I?
--f
G C PSL2(R).
If G' is another group for which X = U/G' and 8' : r + G' is an isomorphism then Bo8-l : G -, G' is the restriction to G of an inner automorphism of P SL2(R). The isomorphism B : r -+ G is characterized by the following property: Let [a]E l?, (Y a closed curve, and let g = B([a]).Any curve joining a point z . E U to g ( z ) in the upper half plane projects to a curve /3 on U / G = X which is freely homotopic to the curve a.
a
CHAPTER 4. TEICHMULLER SPACES
166
It follows that - even thought there is some ambiguity in the choice of the group G and the isomorphism 0 - the point [e : r -, PSL2(R)] E p(r,PSL2(R)) depends only on X . A similar argument shows that the point [8 : r --f PSL2(R)] E 'TO(r,PSL2(R))depends only on [XI E T(C). We conclude therefore that p : T ( C )-+ p(I',PSL2(R)),[XI H [8 :
r -,PSL2(R)]
is a well defined mapping. With the help of the uniformization theorem, one can easily show that p is injective. The next thing that we should observe is that
The reason is that when defining the Teichmiiller space T ( C )we started with only those complex structures of C that agree with the given orientation of C. The complex conjugates of such complex structures form a mirror image of T ( C ) which can be mapped to 7'(r,PSLz(R)) as well. It follows that the Teichmiiller space P ( r ,PSL2(R))has two connected components which are both models for the Teichmiiller space T ( C ) . We denote these components of P ( r ,PSL2(R)) by e ( r ,PSL2(R)) and ’Z?(I’ PSL2(R)). , For more details we refer to [25]. For our purposes it is better to study representations in SL(2,R)instead of the representations in PSL(2, R). By Theorem 3.22.1 (on page 136), in the case of the fundamental group r of an oriented compact surface without boundary, every (faithful) representation 8 : r + PSL2(R) can be lifted to a (faithful) representation 8 : r + SL2(R). On the other hand, every (faithful) representation 8 : r SL2(R) projects to a (faithful) representation B : r -, PSL2(R) because the center of the fundamental group of a compact and oriented surface of genus > 1 is trivial. It follows, therefore, that the projection --f
is surjective. This projection is, of course, continuous and open. It is also obvious that Ro(l',SL(2, R)) projects to R0(r,PSL(2,R)). Since p ( r ,P W 2 , R)) has two connected components,
4.11. REPRESENTATIONS OF GROUPS
167
has only finitely many components. The part of 7"(I', SL(2, R))projecting to T ( I ' , P S L ( 2 , R ) ) will be denoted by T ( I ' , S L ( 2 , R ) ) . Since SL(2,R) is connected, the projection
R0(r,SL(2,R))
-, p ( I ' , S L ( 2 , R ) )
defines a bijective correspondence between the components of
RO(LSL(2, R ) ) and those of P ( r ,SL(2, R ) ) . Let G, be the group generated by the rotation of the upper half-plane around the point i by the rational angle m , / n in the positive direction. Assume that m, and n are relatively prime integers and that the sequence m,/n converges to an irrational number s. Then the generators gn of the groups G, form a converging sequence and limn+mgn = gs, which is a rotation by the angle s. So, in some sense, the discrete groups G, 'converge' to the group (gs) which is not discrete. This is, nevertheless, possible only if we allow G, change as a group. Above group G, is a cyclic group of order TZ.For different values of n these groups are not isomorphic to each other. In the case we are considering the situation is different. The following has been shown in [39].
Theorem 4.11.1 Connected components of Ro(I',SL(2, R ) ) are connected components of R ( r ,SL(2, R ) ) . Proof. We have to show that discrete faithful represtations of I’ in SL2(R) form an open and closed set in the space of all represtations. The fact that discrete representations form an open set is an important result of A. Weil who showed in [97, $11 that
Tt0(r,SL(2, R)) is open in R(r,SL(2, R ) ) . We will not reproduce his proof here. It remains to show that
is also closed in R(r,SL(2, R ) ) . In the case that we are considering, namely that of a fundamental group r of a compact surface, this fact follows immediately from Theorem 3.11.2 (on page 106). Assume that 8, : r + SL2(R), n = 1 , 2 , . . ., is a sequence of faithful representations such that for each n, U / O , ( r ) is a compact Riemann surface. Then by Theorem 3.12.1, all non-identity elements of each @,(I?) are
CHAPTER 4 . T E I C H M ~ L L E RSPACES
168
hyperbolic Mobius transformations. If On -+ 8 as n + 00, then, by the definition of the topology, 8,(7) + B(7) for each y E I?. The matrices On(7),7 E l? \ {Id}, correspond to hyperbolic Mobius transformations. A sequence of hyperbolic Mobius transformations can converge only to one of the following Mobius transformations: a
a hyperbolic Mobius transformation,
a
a parabolic Mobius transformation,
a
the identity.
It follows, especially, that the group 8(r)cannot contain matrices corresponding to elliptic Mobius transformations. Therefore it follows, by Theorem 3.11.2, that the Mobius group corresponding to 8(r)is discrete. The projection R ( r ,SL(2, R)) + 7(r,SL(2, R)) is open. Therefore the components of p ( r ,SL(2, R)) and those of SL(2, R)) are also components of l ( r ,SL(2, R)). The following lemma characterizes components of q(I', SL(2, R)):
q(r,
Lemma 4.11.2 Assume that the points corresponding to the representations 6 : r + SL2(R) and 8' : r + SL2(R) belong to the same component o f q ( r , SL(2, R)). Then, for any [a]E r, truces of the matrices 8([a])and B'([a])E SL2(R) have the same sign. Proof. Assume the contrary. Then there exists an a I? and representations 8 : I' SL2(R) and 8' : r + SL2(R) which belong to the same component of q ( r ,SL(2,R)) and for which the traces of the matrices @(a)and O'(a) have opposite signs. Since 8 and 8' belong to the same component of 7$(l?, SL(2, R)) we have a continuous mapping
[o, 11 + G ( ~ , S L R)), ( ~t ,
C*
such that 8, = 8 and Then the mapping
( 8 , :r
+
SL~(R))
= 8'.
is continuous as well. Here x(Bt(a))is the trace of the matrix @,(a)E SL2(R). Because of the assumptions concerning a , 8 and 8' this mapping changes sign on [0,1]. Therefore we can find an s E [0,1] such that x(e,(a))= 0.
4.11. REPRESENTATIONS OF G R O U P S
169
Since, for every t E [0,1], we have
every matrix &(a),a E I', corresponds to a Mlibius transformation in the covering group of a compact and oriented surface of genus > 1. Every such Mobius transformation is hyperbolic, i.e., the trace of such a matrix has to have absolute value 2 2. We have therefore reached a contradiction proving the lemma. Let u s now take a closer look at the projection 7O(FlSL(2,R)) + We make first the following observation: Representations 8 j : I’ + SL(2,R), j = 1 , 2 , project to the same representation I' + P S L ( 2 , R ) if and only if there exists a function ( on I', taking the values f l , such that & ( y ) = ((y)&(y) for all y E .’I Using this remark and the reasoning of the above lemma we prove:
P ( r ,PSL(2, R ) ) .
Theorem 4.11.3 Let C be a compact and oriented surface of genus > 1. Assume that I? C S L ( 2 , R ) is isomorphic to the fundamental group of the SL(2, R ) ) has finitely many surface C with some base point. The space 7,"(I', components each of which is homeomorphic to the Teichmziller space of C . Proof. The natural projection
Il : q ( r ,SL(2, R ) )
-+
q(I', PSL(2, R ) )
is continuous and open. It is clear that I$(I',SL(2,R)) has only finitely many components. It suffices to show that no components of
q(LSL(2, R ) ) contain two different points which project onto the same point of
q(LP W 2 , R ) ) . To that end let
e :’I
-+
P S L ( 2 , R ) represent a point of
Let 8 : I' -+ S L ( 2 , R ) be a representation that projects to 8. If 8’ : r + S L ( 2 , R ) is another representation projecting also to 8 then there exists a function ( on I' taking the values f l such that 8'(y) = ((y)8(y) holds for all y E r. Let us show that there is no continuous path, in 7$(I', SL(2, R)), joining two different points of 7,"(I SL(2, ’, R ) ) , which both project to the
CHAPTER 4. TEICHMULLERSPACES
170
same point in q ( F , PSL(2, R)). Assume that one these points corresponds to 8 and the other to 8’. To that end, consider the function t satisfying 8’ = 6 8. Since 8 # 8’ there exists an y E r such that ((7) = -1. Considering the function
-
t , : 73r, SL(2, R))
+
R, PI I-+ x
and repeating the argument of Lemma 2.1 we conclude that [8] and [O’] do not belong to the same component of T ( r ,SL2(R)).
4.12
The algebraic structure
The Teichmiiller space of a compact and oriented surface C can be given the local structure of an affine real algebraic variety. We will use here traces of elements of SL2(R) to parametrize the Teichmiiller space and to embed it into an affine space RM in such a way that it becomes a component of an affine variety. The construction that we review here is due to Heinz Helling
(WI
Let l? be again the fundamental group of a compact and oriented surface C. Let 0 1 , . . .,ambe any set of generators for r satisfying certain defining relations. Let I,,, denote the ordered set of all ordered j-tupels
of natural numbers with 1 5 y I( = K ( m )be the set
<
u2
<
.*-
<
u,
m, 1 5 j 5 m. Let
zc = { Q , I a y. ..a”jl(v1,u2,.. .,V j ) E I m } . For any representation 0 : I’ -+ SL2(R) we may form the function
(Here x(O(y)) is the trace of the matrix 0(y) E SL2(R).) This function is referred to as a truce function. Define the mapping
R(r, s ~ ( 2R)) , + R~”’-*, 8 I-+ (. . .,x(e(a,Iay. . .a V j ) ).,..) E R ~ ” - ~ (4.21)
4.12. THE ALGEBRAIC STRUCTURE
171
Since traces are invariant under conjugation, this defines a mapping
Let AK be the image of 7(r,SL(2, R)) under this mapping, and let J ’ be the ideal of polynomials vanishing on Ah'. These polynomials consist of all relations between the values of traces functions on I?. By the properties of traces, these relations are polynomials with rational coefficients. For a detailed discussion of these facts see Section B . l in Appendix B.2 Let V j be the set of zeros of J' in RZm-'. Clearly R(r,SL(2, R)) maps into Vr under the mapping (4.21), i.e., hK
( q r ,sL(2, R)) C Vr.
The above inclusion is actually an equality, i.e.,
ILK (7(I', SL(2, R)) = Vr. This is not difficult to see and has been shown in Appendix B, Corollary B.1.2 on page 247. Let V; = 1 1 (~c ( r ,SL(2, R))). In view of Theorem 4.11.1 we have: Theorem 4.12.1 The set V j is a union of components of the afine real algebraic variety Vr. The mapping
q(T',SL(2,R)) -+
1 1 :~
Vj
is a homeoinorphism with respect to the Hausdorfl topology of the afine space containing Vr . By Theorem 4.11.3 we have the following: Theorem 4.12.2 Each component of V: is homeomorphic to the Teichmiiller space T(C).
In this way the Teichmuller space becomes a component of an affine real algebraic variety. The construction involves some choices like the choice of generators for r. Heinz Helling ([39]) has shown that this construction is essentially independent of these choices. And that the action of the modular group on this algebraic model for T (C) is biregular and can be defined by polynomials with rational coefficients. 21n [40] Helling has even computed these polynomials in the case of genus 2 surfaces.
CHAPTER 4 . T E I C H M ~ L L E RSPACES
172
Reduction of parameters
4.13
In this section we continue to study oriented compact surfaces without boundary. In the above construction we obtained, via the mapping hK, a presentation of the Teichmiiller space of such an oriented surface C of genus g (and without boundary) as a component of an affine real algebraic variety in an affine space RMfor a rather large M . In this chapter we show that the embedding of the Teichmiiller space can be chosen in such a way that the codimension of the image of the Teichmiiller space will be two. It is our conjecture that, in the case of oriented compact surfaces without boundary this is also the smallest possible codimension that can occur when parametrizing Teichmiiller spaces of such surfaces by trace functions. Let X be a complex structure on a compact and oriented surface C which does not have any boundary components and whose genus g is > 1. For any element [a]E r of the fundamental group of C let l , ( X ) denote, as before, the length of the geodesic curve homotopic to a on X. Theorem 1.6.4 (on page 46) gives a set K’ = { a l , .. .,(Y6g-4) of closed curves representing elements of r such that the associated mapping
is injective. The various mappings of the above construction can be collected to the following diagram:
M(C)
1
-+
Ro(I',SL(2,R))
C
R(I',SL(2,R))
P(I',SL2(R))
c
7(I',SL2(R))
1
1
2
R2m-1
/"
W) On the other hand we may form the mapping h p : I(I',SL2(R)) R6g-4 replacing K by K’ in the construction of h K . We consider this mapping and show first the following result:
+-
Lemma 4.13.1 The mapping h ~ ist injective on p(I', SL2(R)). Proof. We first have to observe that the set K' certainly contains generators for I'. By Lemma 2.1, for each j the traces of the matrices 8 ( [ a j ] ) ,[aj]E K', are either positive for all [O] in a fixed component of P ( r , S L 2 ( R ) ) or all negative. Signs of the traces of the matrices e ( [ a j ] )are determined by the component of Io(I',SL,(R)) to which [el belongs. These signs also determine the corresponding component. It follows therefore that the images,
4.13. REDUCTION OF PARAMETERS
173
under the mapping h ~ :tP ( r ,SL2(R)) + R6g-4, of distinct components of 'F'(l7, SL2(R)) are distinct. It suffices t o show therefore that the mapping h ~ ist injective when restricted to a component of p(l7SL2(R)). , Let now [O] E P ( r , S L 2 ( R ) ) be a representation corresponding to the point [XIin T(C).Then,
Define the mapping W : R6g-4 + R6g-4 setting
W ( .. ., r j , . ..) =
(.. (i .,log
(Irjl
t
,/-))
.)
,. . .
(4.22)
Then we have Ch.1
=W
o hK,.
Since .CK~ is injective by Theorem 1.6.4 (on page 4 6 ) , also hKi has to be injective on a component of l ( r ,SL2(R)). This proves the lemma. Let Rkc R2"-' be the corresponding subspace and let p r : R2"-' + Rkbe the projection onto this subspace. The above statement simply means that the mapping hlct = pr o h K : T (C) + Rk is injective. The image of an affine variety under a projection is, on the other hand, still an affine variety. Therefore VKI= pr(Vr) C Rkis an affine variety. It is clear by the construction that p r o hh.(T(C))is contained in a component of this variety V p . The projection being an open mapping, p r o h K ( T ( C ) )is an open subset of VK. Repeating the arguments of the proof of Theorem 4.11.1, it follows finally that pr o I ~ K ( T ( Cis) )also closed in VIC. Therefore we have:
Theorem 4.13.2 The image of the TeichmGller space T(C)under the mapping h p is a component of an afine real algebraic variety of codimension 2. Proof. The only thing that remains to be shown is the statement concerning the codimension. But that is immediate since the dimension of the Teichmuller space is 6g - 6 while the dimension of the ambient affine space is 6g - 4 . The theorem is therefore proved.
CHAPTER 4. TEICHMULLERSPACES
174
It is also obvious that all the results of Heinz Helling hold also for this presentation of the Teichmiiller space. In particular, the modular group acts as a group of biregular self mappings of VKI and maps the part of VKI corresponding to the Teichmiiller space T ( C ) onto itself. This is actually quite straightforward, Helling's arguments can be repeated here word by word ([39]).
4.14
Extension to non-classical surfaces
In this Section we show that even the Teichmiiller spaces of non-classical surfaces can be given a n affine structure in a natural way. We cannot, however, proceed here by simply repeating the preceding arguments for non-classical surfaces. The above construction was based on a result of A. Weil which does not hold for surfaces with boundary. Using Theorem 4.5.1 (page 149) we can deal with this difficulty. So let C be a compact non-classical surface of genus g . Let Cc be its complex double and u : C" -+ C" the orientation reversing involution for which C = C C / ( a ) . Consider the presentation for the Teichmiiller space T ( C C )as a component of an afine variety. It depends on various choices like the choice of the set li of generators for the fundamental group of C". The affine structure is, nevertheless, independent of this choice. So we may start with any generating set K . In particular we may choose K in such a way that the involution u maps the elements of K onto elements of I<. Therefore n defines a permutation of the elements of 11'. Checking through the construction it is now obvious that we have the following commutative diagram: T(CC)
1..
T(CC)
-
Vr C RM 1P.r
1P.r
Vr C RM
where per : RM -+ RM is a permutation of coordinates of R M ,r is the fundamental group of Cc and Vr is a real affine variety. By Theorem 4.12.2 the image of T ( P ) in Vr is a component of Vr. On the other hand, by Theorem 4.5.1, the Teichmiiller space T ( C )of the surface C can be identified with the fixed-point set T(CC),*of the involution u* :T (C") -+ T (C"). Now the fixed-point set of a permutation of coordinates per : Vr + Vr is trivially an affine variety, denote that by Since the above diagram commutes we conclude finally from Theorem 4.12.2 that T(Cc),* is a component of the affine real algebraic variety (Vr)per.
4.14. EXTENSION TO NON-CLASSICAL SURFACES
175
This affine structure depends, a priori, on all the choices made. In view of the results of Helling it follows, however, that the various affine structures obtained for T (Cc),* in this way are isomorphic. We have therefore:
Theorem 4.14.1 The TeichmCller space of a non-classical compact surface can be represented as a component of an afine real algebraic variety.
This Page Intentionally Left Blank
Chapter 5
Moduli spaces 5.1
Introduction to Chapter 5
Points of the Teichniiiller Tg space of a genus 9 surface C are isomorphism classes of marked complex structures of the surface C. Here two complex structures X and Y define the same point of the Teichmiiller space if there is a holomorphic homeomorphism f : (C, X )+ ( C , Y ) , which is homotopic to the identity. This additional topological condition “homotopic to the identity” was enforced in order to get a nice structure for the parametrizing space as was explained in the introduction to Chapter 4. As we have seen in that Chapter, the Teichiniiller space of a compact genus g surface is a complex manifold (of complex dimension 3 9 - 3 ) homeomorphic to an euclidean space. From the point of view of Rieinann surfaces, this topological condition is, however, not natural. The natural object of study is the moduli space, Mg of genus g Rieinann surfaces, i.e., the space of isomorphism classes of complex structures of a genus g surface. This space is, however, harder to study than the Teichmiiller space. In this Chapter we will consider the structure of the moduli space of compact Riemann surfaces. We show that the moduli space of compact classical genus g surfaces is a connected but not compact Hausdorff space. In the same way on can also study the moduli space of compact non-classical genus g surfaces. It turns out that this moduli space is a non-compact Hausdorff space with L(3g 4)/21 connected components. After these observations, which follow rather quickly from Teichmiiller theory, we turn our attention to the question of finding a geometrically natural compactifications for these moduli spaces. We construct them using straightforward geometric methods. It turns out that both moduli spaces, that of classical genus g surfaces and that of non-classical genus g surfaces,
+
177
178
CHAPTER 5. MODULI SPACES
admit a similar compactification which makes them both connected and compact Hausdorff spaces. This construction relies on considerations of Chapter 3, especially on Theorem 3.19.1 (on page 131), which plays a key r61e here. We conclude this Chapter by considering the analytic structure of the moduli space of classical and non-classical genus g Riemann surfaces.
5.2
Moduli spaces of smooth Riemann surfaces
In this section we suppose everywhere that the surfaces that we are considering are compact and have negative Euler characteristic. Sometimes, when we want to stress the fact that we are dealing with ordinary Riemann surfaces, we may use the adjective 'smooth' as contrary to 'non-smooth' Riemann surfaces which are allowed to have simple singularities. In this Section we study only these ordinary smooth Riemann surfaces. Recall the definitions for the Teichmuller space (Definition 4.3.1, on page 145) the moduli space (Definition 4.3.3) and the modular group of a compact surface C. By the definitions it is immediate that
M ( C ) = T(C)/I'(C).
(54
Let us first consider a classical compact genus g surface C. For such a surface C we use the notations I? = I'(C), Tg = T ( C )and Mg = M ( C ) . By (5.1) we can derive results concerning the moduli space by using those of the acts Teichmiiller space. Recall first that by Theorem 4.10.5 on page 163, properly discontinuously on the Teichmiiller space Tg, which in this case is a is a complex manifold of complex dimension 39 - 3 (for a description of the complex structure see page 148). Using (5.1) we equip the moduli space with the quotient topology. Elements of the modular group are isometries of the Teichmiiller metric. Therefore the Teichmiiller metric of T g induces also a metric on M g , which is, therefore, a metric space. We have: Lemma 5.2.1 The moduli space M g of a compact and classical genus g surface is a connected and non-compact metric space.
Proof. By the above remarks, the moduli space Mg = T g / P is a metric space. It is connected, since the Teichmiiller space Tg is connected by Theorem 4.4.1 (on page 147). Thus the only thing that remains to be shown is the statement about the non-compactness of the moduli space. To that end, consider first the
5.2,
MODULI SPACES O F SMOOTH R I E M A N N SURFACES
179
Teichmiiller space Tg.Define the function E
:T
g
+ R+, [XI H min{l,(X)
I cr a closed geodesic curve on X }
For a Riemann surface X , €([XI)is the length of the shortest simple closed geodesic curve on X . Recall that by Corollary 3.15.2 (on page 116) there are always curves with minimal length on any compact hyperbolic Riemann surface. Using the discreteness of the length spectrum and the continuity of the geodesic length functions one can easily show that locally the function E is the minimum of a finite number of geodesic length functions. The function c is, therefore, continuous. It is also equivariant with respect t o the action of the modular group, i.e., 0
j* = 6,
v j * E rg.
We conclude that c defines a continuous function Mg .+ R+. We use the notation E also for this function. Assume that Mg is compact. Then the continuous function E attains its minimum emin at some point [XIE Mg. This minimum is, of course, a positive number. This would imply that all non-trivial simple closed curves on any compact Riemann surface of genus g have length 2 e m i n . But this is absurd. Using pairs of pants with short boundary geodesics it is easy to build Riemann surfaces of any genus g , g > 1, such that these surfaces have arbitrarily short non-trivial simple closed geodesics. The above proof of Lemma 5.2.1 suggests that an ideal boundary of the moduli space of genus g Riemann surfaces, g > 1, consists of points corresponding to such singular Riemann surfaces where we have replaced certain simple closed geodesic curves by points, i.e., the length of these geodesics 0 as we approach this boundary point of the moduli space. That this is, indeed, the case will be shown in the subsequent sections. Main problem here is to get a good geometric picture about all the possible degenerations of compact Riemann surfaces. Considerations of Chapter 3 play an important rble here. The constructions that we will present for the moduli spaces of classical Riemann surfaces can be generalized to the case of the moduli spaces of nonclassical Riemann surfaces of a given genus g. Most important problems here are related with the coinpactification. Before taking up these matters we will consider the structure of the moduli spaces of smooth non-classical Riemann surfaces. --f
CHAPTER 5. MODULI SPACES
180
5.3
Moduli spaces of genus 1 surfaces
Moduli spaces of genus 1 Riemann surfaces are quite well understood. In order to motivate the subsequent considerations we will, in this chapter, review this, more classical, part of the moduli problems. Recall that genus 1 Riemann surfaces are: 0
torus,
0
annulus,
0
Klein bottle,
0
Mobius band.
Moduli spaces of the non-classical genus 1 surfaces, the annulus, the Klein bottle and the Mobius band, will be studied by embedding them into the moduli space of the torus. This embedding will be constructed by means of the complex double and is based on Theorem 4.5.1 (on page 149). Therefore we start with considering the moduli space of the torus. Let T' be a topological torus. Fix a basis (a1,ayz)for the fundamental group of T'. Here we use the notation cyj for a closed curve aj and for its The Riemann surface homotopy class. Let X a complex structure on .’2 X = ( T I ,X >has the finite complex plane C as its universal covering surface and = C/L,,
x
+
where L , is a lattice generated by two translations g(z) = z w1 and h ( z ) = z 4. We may, furthermore, assume that z H z wj covers the homotopy class of a j . The quotient C / L , is a torus if and only if r := W I / W ~is not real. Without restricting the generality we may also assume that w1 = 1 and I m r > 0. Then L , = Z + Z .r and the mapping
+
+
is a bijection and the Teichmuller space of the torus can be, via this mapping, identified with the upper half-plane U (Lemma 4.6.1, page 152). We want ot get our hands on the moduli space of the torus. To that end we need to get a sufficient and necessary condition which guarantees that two given torii are isomorphic. That is done in the next lemma. Suppose, t h a t I m r > O . Let L , = Z + Z . r a n d L , , = Z + Z . r ' .
5.3. MODULI SPACES OF GENUS 1 SURFACES
181
Lemma 5.3.1 There is a holornorphic homeomorphism between the torii T = C / L , and T = C / L , I if and only if there exists a matrix
such that
Pro0f . Straight for w ar cl conipu t at ion.
Definition 5.3.1 The group SL;?(Z) whose elements are Mobius transformations az + b Z H cz + d where a , b, c d E Z und ud - Dc = 1 is called the elliptic modular group. The elliptic modular group acts on U and is discrete. It is properly discontinuous by Theorem 3.5.3 (page 83). For a lattice L , = 2 Z . T consider the numbers
+
~3
= 140
1 -. A6
Definition 5.3.2 Let j ( X )= j ( T ) =
1728 . g; 9; - 27g:
+
f o r a torus X = C / L , , L , = Z Z . T . The function j ( w ) is the elliptic modular function.
Theorem 5.3.2 Torii C/(Z
+z-
T )
and C/(Z
are isomorphic if and only if j ( T ) = j ( ~ ' ) .
+z
*
7’)
CHAPTER 5. MODULI SPACES
182
For a proof we refer to the monograph of Siegel [86, Theorem 1 on page 791 and that of Alling [7, Theorem 9.29, page 1811. The latter contains a detailed study of the elliptic modular function. From Lemma 5.3.1 and from Theorem 5.3.2 it follows that j defines a mapping j : M' --$ C which is actually a bijection. We have, furthermore, the commutative diagram:
U
This is the classical construction for the moduli space of tori. The mapping j : U + C is a smooth covering map whose cover group is the elliptic modular group. This discontinuous group contains the parabolic Mobius transformation z H z 1 as primitive element. By Lemma 3.10.2, a fundamental domain for this group contains the domain { z E C I Im z > 1, IRezl < This group serves also to show that the half-plane H in Lemma 3.10.2 is the largest possible, since a closer analysis shows that a fundamental domain for the elliptic modular group is the interior of
+
i}.
W = {w E UI - 1/2 < Rew 5 1/2, IwI
1 1 and IwI > 1 for Rew 5 0).
A detailed proof for this fact can be found in the monograph of Siegel [87, Theorem 3, section 91 or in that of Norman Alling [7, Chapter 91. We have observed above that the elliptic modular function furnishes a bijection j : M' C. The complex plane can, on the other hand, be compactified to the Riemann sphere C by adding the point at the infinity. That is also the usual compactification for M'. It is necessary to try to understand this compactification also in concrete geometrical terms. What kind of a Riemann surface corresponds to the point at the infinity? Here the situation is different from the general case. The reason really lies on the fact that the natural metric of a torus has curvature 0. Therefore each class of holomorphically homeomorphic torii has representatives whose area and/or diameter are either arbitrarily large or arbitrarily small. In the case of Rieiiiann surfaces of genus > 1 the situation is completely different. By the Gaua-Bonnet theorem, the area of a Ftiemann surface of genus g, g > 1, is always 4n(g - l ) , i.e., the area depends only on the genus and not on the particular complex structure. In order to understand properly the degeneration of torii it is, therefore, necessary to take particular representatives of each class of holomorphically isomorphic torii. One possibility is, for instance, to consider only those torii which have diameter < 2, i.e., which are of the form C / L , ,1.1 < 1.
-
5.3. MODULI SPACES O F G E N U S 1 SURFACES
183
This can be done, since for each T' we can always find an element A of the elliptic modular group such that IA(T')I < 1. Considering these torii one can interpret the point at the infinity of M' geometrically as a circle. The situation here is the following. As a sequence C / L , approaches the infinity of the moduli space M ' , then we may suppose that the parameters T, are chosen in such a way that T,, + 0, i.e., that the radius of injectivity of C / L , + 0 as n -+ 00. This means that the limiting surface is a circle, and, as we let a point in M' approach the infinity, then the corresponding Riemann surfaces collaps everywhere. The limiting object is not anymore a surface but a manifold of real dimension 1. The case of Riemann surfaces of genus > 1 is completely different as we will see in the proceeding sections. In the case of these hyperbolic Riemann surfaces collapsing can happen only in such a way that certain simple closed curves get replaced by points. The limiting structure is still a surface but it has finitely many simple singularities. Let us next consider non-classical surfaces of genus 1. Such a (topological) surface C has, by the definition, the torus T' as its complex douT' such ble, and there exists an orientation reversing involution u : T' that C = T ' / ( u ) . Such an involution induces a self-mapping u* of the Teichmiiller space T' of the torus. Assume that u1 and 6 2 are different orientation reversing involutions of the torus. They induce self-mappings a; and uz of the Teichmiiller space T ' , which usually are also different. Since 6 1 and 6 2 are both orientation reversing, u1 o u2 is orientation preserving. Hence the induced mapping (u1 o u2)* = a; o u; belongs to the mapping class group r'. Since M' = T’/I’’ we conclude that both orientation reversing involutions u1 and u2 induce the same self-mapping of the moduli space M ' . This induced mapping is also an involution. In order to find out what is the induced mapping at the level of the moduli space, consider the mapping .--)
u* : u
+
u, a*(.)
= -7.
A straightforward computation shows that this mapping u* : T' + T' is induced by an orientation reversing involution u : T' + T' for which T * / ( u ) is an annulus. By Theorem 4.5.1 (on page 149), the Teichmiiller space of an annulus can then be identified with the fixed-point set of the involution u* :T' + T', i.e., with the imaginary axis. Let 7-
:
c
--$
c,.(z)
= z.
On basis of the construction and the commutative diagram (5.3) we have: j o u* = T o j .
184
CHAPTER 5. MODULI SPACES
Figure 5.1: The unshacled part of the complex plane is a fundamental domain of the elliptic modular group. Those points of the fundamental domain for which j : T' -+ C is real are indicated by a thick line. Let 7r : T' -+ M' denote the projection. We conclude now that be the above considerations, ~(2’2.) C R. Here Ti. is the fixed-point set of the involution o* : T' + T'. In order to see what kind of torii may have real moduli, let
( M 1 ) =~ { ~[ X I E M’ 1 X has a n antiholomorphic involution}. The set ( M ' ) N c consists of ordinary isomorphism classes of Riemann surfaces which have a symmetry. It is best t o do the computations a t the level of the the Teichmiiller space. In figure 5.1 those points of a fundamental domain of the elliptic modular group, for which the fuiiction j takes real values, are indicated by a thick line. The elliptic modular function j takes real values also at many other points which do not belong to the fundamental domain of Figure 5.1. Detailed computations related t o computing real values of the elliptic modular function can be found in the monograph of Norman Alling. [7, Chapter 91 We will skip the details here. Direct computations show that { z I Im z = +} and { z 1 1.1 = 1, Im z > 0} are both models for the Teichmuller space of the Mobius band while the
5.4. S T A B L E R I E M A N N SURFACES
185
imaginary axis is a model for Teichmuller spaces of the annulus and the Klein bottle. This implies that
( M ' ) N c = R. The above considerations are only technical and do not have any hidden difficulties. They can be interpreted in terms of algebraic geometry. Classical compact genus 1 Riemann surfaces are simply complex algebraic curves, i.e., they can be ernbedded into a projective space in which they are defined by a finite number of polynomial equations satisfying certain regularity conditions. The moduli space M' is, therefore, the moduli space of genus 1 complex algebraic curves. Complex algebraic curves, which have an antiholomorphic involution, are, on the other hand, isomorphic t o curves defined by real polynomials, i.e., they are real algebraic curves. The set ( M ' ) N c consists of complex isomorphism classes of real algebraic curves. By the above observations we have now: Theorem 5.3.3 The set of real points of the moduli space M ' , M'(R), consists of complex isomorphism classes of real algebraic curves. Theorem 5.3.3 is actually well known in algebraic geometry and easy to prove. For j # 1728, the j-invariant of the curve y 2 = 4 2 - a x - a , a = 27j/(j-l728),equals this given j . For j = 1728, take the curve y2 = 4x3--5.
5.4
Stable Riemann surfaces
A main goal of this monograph is to understand, from a geometric point of view, the compactification given by Muinford and Bailey (cf. [65])for the moduli space of smooth compact Riemann surfaces. To that end we have to extend our considerations to Rieiiiann surfaces that are allowed to have singular points. In the proceeding definitions we follow the presentation of Bers ([la]).
Definition 5.4.1 A surface with nodes C is a Huusdorflspace whose every point has a neighborhood hoineomorphic either to the open disk i n the complex plane or to N = ( ( z , ~ f) C 2 J z w= 0, J z J< 1, J w <~ l}. A point p of C is a node i f every open neighborhood of p contains a open set homeomorphic to N . Component of the complement of the nodes of C is a part of C. The genus of a compact surface with nodes C is the genus of the compact smooth surface obtained b y thickening each node of C .
CHAPTER 5. MODULI SPACES
186
Figure 5.2: A stable surface, terminal stable surface and a non-stable surface with nodes.
A stable surface with nodes is a compact surface with nodes whose every part has a negative Euler characteristic. A stable Riemann surface with nodes is u stable surface C together with a complex structure X for which each component of the complement of the nodes of C is obtained deleting a certain number p j points from a compact Riemann surface of genus g j . The stability condition means that
If X is a stable Riemann surface, then every part X j of X is a hyperbolic Riemann surface, i.e., every X j carries a canonical metric of constant curvature -1 which is obtained from the non-euclidean metric of the upper half-plane (or the unit disk) via uniformization. When we speak of lengths of curves on parts of a stable Riemann surface, we always refer to this canonical hyperbolic metric. A stable surface C of genus g can have a t most 39 - 3 nodes. We say that C is terminal if it has this maximal number of nodes. Definition 5.4.2 A strong deformation with nodes C1 onto a surface with nodes C2 is a continuous surjection C1 + C2 such that the following holds: 0
the image of each node of
C1
is a node of Cz,
5.4. STABLE RIEMANN SURFACES 0
a
187
the inverse image of a node of C2 is either a node of C1 or a simple closed curve on a part of C1, the restriction of C1 + C2 to the complement of the inverse image of the nodes of C2 is a n orientation preserving h o ~ e o ~ o r p h i sonto m the complement of the nodes of C 2 .
Pairs of pants were defined (Definition 3.16.1 on page 117) as dosed triply connected domains with boundary components. Allowing also pairs of pants that are degenerate in the sense that some of the boundary components are only points, one can decompose also stable Riemann surfaces into pairs of pants. Let us next recall and extend the definitions of Section 3.16. Let C be a stable genus g surface. A decomposition of C into pairs of pants is an ordered collection p = (pl,p2,. . .,p 2 g - 2 ) of disjoint pairs of pants on C such that: 0
0
the union of the closures of the pairs of pants Pj covers the whole surface C. The intersection of the closures of any two pairs of pants Pi,Pj, i # j, is either empty or a union of nodes of C and of closed curves cr on C.
It follows that all the nodes of C appear as boundary components of pairs of pants in any decomposition of C into pairs of pants. If C is a teriiiinal stable surface, then all the boundary components appearing in any decomposition of C into pairs of pants are nodes of X. If C is not terminal, then, in addition to the nodes, there will be a number of other boundary components which are simple closed curves on C. We call these nodes and curves decomposing nodes and curves of P. A decomposition P = (Pj) of C into pairs of pants is oriented i f
1. The set of boundary Components of each pair of pants Pj E P is ordered. 2. All decomposing curves are oriented.
If P is an oriented decomposition of C into pairs of pants, then we may speak of the first, second and third boundary component of any pair of pants belonging to P. Furthermore, the ordering of the pairs of pants together with the ordering of the boundary components in the various pairs of pants induce an order in the set boundary components of the individual pairs of pants in the decomposition P . Observe that each decomposing curve appears twice in this ordered set of boundary components of the pairs of pants.
188
CHAPTER 5. MODULI SPACES
Figure 5.3: Base points on the boundaries of a pair of pants. Let ( P , d ) be a pair of pants with ordered boundary components and with an intrinsic hyperbolic metric d. For a later construction it is necessary to associate u base point ( j to all boundary curves aj of ( P ,d). T h a t is done in the following way. Let yt,j be the geodesic arc in ( P ,d ) which joins the it” boundary component t o Ihe jthboundary component, i, j = 1,2,3, and is perpendicular t o both of them. Such a geodesic arc is always uniquely defined. This is not hard to see and can be best shown considering the universal cover of the coiiiplex double of a pair of pants. The geodesic arcs y;,j are then simply arcs on euclidean cirles perpendicular t o the euclidean circles corresponding t o the respective boundary components. For a notational convenience, define y3,4 setting y3,4 = y3,1. T h e base point cj of the boundary component aj is the starting point of yj,j+l on aj. Let X be a complex structure of C. Then X = (C, X ) is a stable Riemann surface. Each part of X carries a canonical hyperbolic metric. An oriented decoinposition of X into pairs of pants is called geodesic if every boundary curve of that decomposition is a geodesic curve on X. If P is any decomposition of X into pairs of pants, then we get always a geodesic oriented decomposition of X into pairs of pants by replacing each decomposing curve by the geodesic curve in its homotopy class. Let P be any geodesic and oriented decomposition of X into pairs of pants. Let a l , . . .,~ ~ be 3the decomposing ~ 4 curves or points. Each curve (or point) aj is either a boundary component of two different pairs of pants
5.4. STABLE RIEMANN SURFACES
189
or appears twice as a boundary component of a single pair of pants.
Let (f be the distinguished boundary point of the jthboundary component of the kth pair of pants of the decomposition P, j = 1,2,3, k = 1 , . .. , 2 g - 2. On each curve (or point) a,,s = 1 , . . .,39 - 3, there are exactly two points The ordering of the pairs of pants belonging to P and their respective boundary components gives us an ordering of these points iflying on one decomposing curve as.We conclude that on each aswe have two distinguished points and These distinguished points are uniquely defined by the complex structure X .
(!.
<:
<:.
Observe that strong deformations act on the set of oriented decompositions of a stable surface C into pairs of pants. More precisely, let f : C' + C be a strong deformation of stable surfaces and let P be an oriented decomposition of C into pairs of pants Pi,. . .,P2g-2. Then f ' ( P ) is the decomposition of El into pairs of pants f-’( P j ) , j = 1 , 2 , . ..,2g - 2 . This is the pull back of the pants decomposition P .
If f : C' + C is a strong deformation and PI is an oriented decomposition of C into pairs of pants such that each curve f-'{a node of C} is a decomposing curve (or point) of P, then we can define the induced decomposition f ( P r )of C into pairs of pants. The pairs of pants of f(P') are images of pairs of pants in PI under the strong deformation f. I f f is a homeomorphism, then the induced decomposition f (P') is defined for any decomposition P.
Definition 5.4.3 The set M gof isomorphism classes of stable genus g Riemann surfaces is the moduli space of stable genus g Riemann surfaces.
It turns out that MYis a natural coinpactification of the moduli space Mg of smooth Riemann surface. This moduli space gets its topology from that of the Teichmiiller space. The same construction cannot easily be which so carried out for MY.The reason is that the moduli space MY, far is only a set, does not have such a nice covering as the moduli space M g . If one tries t o extend geometrically the Teichmuller space so that it would cover all of the space then one does not get a manifold anymore. One gets a rather complicated analytic space instead of a complex manifold. This approach, that was initiated by C. J. Earle and A. Marden ([27]) has recently been completed by F. Herrlich ([41]). In this monograph we will not follow that approach. We will resort to more concrete constructions that are based on the considerations of Chapter 3.
xg,
CHAPTER 5. MODULI SPACES
190
Fenchel-Nielsen coordinates
5.5
In this Section we recall the definition of the Fenchel-Nielsen coordinates for complex structures of stable topological surfaces. Let C be a stable topological surface of genus g. Fix an oriented decomposition P of C into pairs of pants. Let X be a complex structure of C. Each homotopy class of closed curves on a hyperbolic Riemann surface always contains a unique geodesic curve. When defining parameters for a complex structure X we first replace the decomposing curves of P with the unique geodesic curves homotopic to the original decomposing curves. In view of our applications we may, without restricting the generality, suppose that the decomposing curves of P are already geodesic curves, i.e., we may limit our consideration to complex structures X E M ( P ) . Let a1,...,03~-3 be the oriented decomposing curves of the pants decomposition P. Recall that any X E M ( P )defines two distinguished points [j and <j on each crj. Let sj denote the distance from <j to [ j measured to the positive direction of aj. In M ( P ) w e can define the functions C j and B j , j = 1 , 2 , . . .,3g - 3, setting =
the length of crj B j = 2nsj/lj if C j > 0 B j = 0 if C j = 0 Cj
(5.4)
It is clear that X and X E M ( P ) are isomorphic complex structures if Cj(X) = t?j(X’) and 6j(X) = 6j(X’) €or all j = 1 , 2 , . . . , 3 9 - 3. A necessary and sufficient condition for X and X t o be isomorphic is that there exists a homeomorphism f : X + X and a decomposition P of X’ into pairs of pants such that the following holds:
1.
P
= f*(P’).
C$ and 0; be the coordinates of X with respect to P which correspond to the coordinates C, and B j of X with respect to P. Then l j = C$ and 0, = B$ for all j = 1 , 2 , . . .,3g - 3.
2. Let
Definition 5.5.1 The coordinates Cj and 6j are the Fenchel-Nielsen coordinates, the coordinutes C j are called the length coordinates or the FenchelNielsen length coordinates and the Coordinates 8j are called the gluing angles or the Fenchel-Nielsen gluing angles. The above definition for Fenchel-Nielsen coordinates is classical. In some considerations it would be a technical simplification to replace the FenchelNielsen gluing angle B j by the product 0; = C j B j . We call the coordinates
5.5. FENCHEL-NIELSEN CO 0RDINATES
191
and l?; the modified Fenchel-Nielsen coordinates. For a clearly written account of the Fenchel-Nielsen coordinates see [30]. Let us take a closer look at the Fenchel-Nielsen coordinates of a smooth Riemann surface. So we suppose now that C is an ordinary topological genus g surface (without nodes). Let f1, fi,. . .,f 3 g - 3 denote the left Dehn twists around the decomposing curves of the pants decomposition P. Let r ( P ) be the subgroup of the modular group r ( C ) freely generated by the elements f;, j = 1,2,.. .,39 - 3. Then every element of r(C) is of infinite degree and r(C) does not contain any finite subgroups save the trivial subgroup consisting only of the identity. The following result is obvious by the definitions:
l j
Lemma 5.5.1 The Fenchel-Nielsen coordinates establish a bijection
T ( C ) / r ( P ) (R+ x +
[o, 2743g-3
7
[XI
V l , 81, *
a .
7
e3g-3,839-3).
(5.5)
Observe that in the above lemma we may visualize the product R+ x [0,2n)as the complex plane punctured at the origin. Consequently, the mapping ( 5 . 5 ) can be interpreted also as an injective mapping Fp : T (C ) p ( P )+
C3g-3.
The image of T ( C ) under this mapping consists of all points of all coordinates non-zero. Let n : T(C)+ T ( C ) / I ' ( P )denote the projection.
C3g-3
with
Lemma 5.5.2 The nzupping Fp
0
x : T (C )
4
c39-3
is real analytic. Proof. By Theorem 4.9.3 (on page 160), the geodesic length functions are real analytic. The Fenchel-Nielsen length coordinates are therefore real analytic. To show the real analyticity of the Fenchel-Nielsen gluing angles, recall the characterization of the complex structure of the Teichmiiller space T(C) as given on page 148. In view of that characterization we have t o show that the Fenchel-Nielsen gluing angles vary real analytically as we deform the complex structure by a Beltrami differential p. That is straightforward and can be seen in the following fashion. Let Q be one of the decomposing geodesics of the pants decomposition P . Denote the corresponding gluing angle by 8. We show that 8 varies real analytically as we deform the Riemann surface X by a Beltrami differential P.
CHAPTER 5. MODULI SPACES
192
To that end, let let j3 and 7 be the two other decomposing geodesics of P such that the end-points t1 and (2 of the geodesic arcs perpendicular to Q and p or to a and 7,respectively, are the two distinguished points of the decomposing geodesic curves a. Use the uniformization to express X as U/G for a Fuchsian group G acting in the upper half-plane. Then we may choose hyperbolic Mobius transformations g, h and h‘ such that 0
the axis of g covers a,
0
the axis of h covers /3,
0
the axis of
11‘
covers y .
We may, furthermore, suppose that the configuration is that of Figure 5.4 were also the geodesic arcs defining the distinguished points is shown. In that figure we have 21 and 2 2 are points lying over the distinguished points (1 and (2 of a. Depending on the choice of the orientation of a, the Fenchel-Nielsen gluing angle 8 associated to a is now simply either 8 = 2 ~ d , & , ~ ~ ) / eor~ 8 = 2 ~ ( 1 -d u ( 2 1 , ~ 2 ) / l a ) . It suffices to show, therefore, that the hyperbolic distance dv(zl,z2) of 21 and 2 2 in U varies real analytically as we deform the group G by a Beltraini differential p of the group. This deformation of G by p means the following process. Assume first that p is a Beltrmai differential of the group G. Recall the definition - of of groups, Definition 4.2.3 on page 143. Let f : U+ Beltraini differentials U be the uniquely defined quasiconformal mapping which has the complex dilatation p in U and fixes the points 0, 1 and 00. The p-deformation of G is then simply the Fuchsian group G, = f,G( f,)-’. An important theorem of Lars V. Ahlfors([2]) and Lipman Bers implies that the values of the mapping f ” depend holomorphically on the complex dilatation p (cf. Theorem 2.4.6 on page 65, or 160, Theorem 3.1, p. 69 and sV.5.11). This implies also that d u ( z 1 , 2 2 )depends real analytically on p.
5.6
Topology for the moduli space of stable Riemann surfaces
Our aim is to define a topology for the space of isomorphism classes of stable compact Itiemann surfaces of a given genus g, g > 1, in such a way that it is possible to understand the degeneration of smooth Riemann surfaces in a concrete geometric fashion. That can be achieved by the Fenchel-Nielsen coordinates. In this Section we first give a definition of the topology and
193
5.6. TOPOLOGY FOR THE MODULI SPACE
Figure 5.4: Geodesic arcs defining the distinguished points
51
and
52.
then show how to interpret the degeneration of smooth Riemann surfaces in this topology. Let E and 6 be positive numbers. We say that the point [Y] E MY belongs to the ( E , 5)-neighborhood U C ([XI) , ~ if and only if there exists a decomposition P of X into pairs of pants such that the following holds:
X such that There exists a strong deformation f : Y the Fenchel-Nielsen coordinates l:,6: ,. . .,l$g-s, 9'3g-3 o f Y with respect to f*(P) satisfy: --f
1.
1L j - L,?1 < E for all j = 1,2, . . .,3g - 3.
2. For all values of j, if l,
> 0 then 10, - O,?I < 6.
Here we have used the notation f*(P)to indicate the pants decomposition of Y whose pairs of pants are inverse images of pairs of pants of the decomposition P of X , and l j and 6, are the Fenchel-Nielsen coordinates of X with respect to P . The sets U , , S ( [ x ] )form a basis for the topology of
mg.
Theorem 5.6.1 The set of isomorphism classes of smooth genus g Riemann surfaces, M g , is dense in the moduli space of stable compact genus g Riemann surfaces, MY, which is a connected Hausdorfl space.
xg.
Proof. By the construction of the topology, Mg is dense in This is clear, since each u,,S([x]), E > 0, neighborhood of a stable Riemann surface contains smooth Riemann surfaces. Proof for the fact that this topology is a Hausdorff topology is rather obvious and is left to the reader. The connectedness of MYfollows from that of Mg (Lemma 5.2.1). The following result follows directly from the definition and from Lemma 5.5.2.
CHAPTER 5. MODULI SPACES
194
Lemma 5.6.2 Consider the Teichmdler space T g of compact genus g Riemann surfaces, g > l, equipped with the usual topology. The projection ~g 2”is a continuous mapping. --$
5.7
Compactness theorem
In this section we show that the moduli space MY, g > 1, is compact. In view of Theorem 5.6.1 it is enough to show the following:
Theorem 5.7.1 The closure of Mg in M g is compact. Proof. Let ( [ ( C , X ) ] be ) an infinite sequence of points of Mg c M .It suffices t o show that there exists a subsequence ([(C, X,,)]) that converges in Zg. By Theorem 3.19.1 on page 131 we can always find a decomposition P, of ( C , X n ) into pairs of pants by simple closed geodesic curves of length < 219. This is the key point in our argument. There are only finitely many topologically different decompositions of the surface C into pairs of pants. Therefore we may - by passing to a subsequence - assume that there is a fixed decomposition P of X into pairs of pants and orientation preserving homeomorphisms f n : C -+ C such that fn(P,) = P for each n. Let Y, be that complex structure of C for which the mapping
is holomorphic.
Let 17, S,: j = 1 , 2 , . . .,39 - 3, be the Fenchel-Nielsen coordinates of Y, with respect to the pants decomposition P. Let a1,...,a3~-3be the decomposing curves of the pants decomposition P. Then l? = la,(Y,) is the length of the simple closed geodesic curve freely homorotopic to the closed curve aj on the Ftiemann surface Y,. By the choice of the pants decompositions Pn of the Riemann surfaces (C, X n ) and by the definition of the complex structure Y, we have now, for M = 219: 1; = la,(Y,) < M
for each j and n. We have also 0 <_ 9: < 2r. Therefore - by passing to a subsequence again - we may assume that all the sequences lj,e!, l f ,.. and 8:, 8!,eg,. .. converge. Let t j = 1; and 6j = limn+oo 67, j = 1 , 2,..., 3 9 - 3 .
.
5.8. S Y M M E T R I C RIEMANN SURFACES
195
We deform next the surface C in the following fashion. If l j = 0 then we replace the decomposing curve aj of the pants decomposition P by a node. Do that for each j with l j = 0. That construction yields a stable surface C* of genus g . The identity mapping C + C induces a strong deformation
f :C
+
C*.
(5.6)
On C* define a complex structure Y* using the Fenchel-Nielsen coordinates l j and 6j with respect to the decomposition P of C* into pairs of pants. That is done in the following way. Using Lemma 4.1.1 we define first, in each pair of pants Pj, the complex structure Y* by the limits l j , j = 1 , 2 , . ..,3g - 3, of the Fenchel-Nielsen length coordinates ly associated to Y,. Next we glue these complex structures of the various pairs of pants together to form a global complex structure of the surface C*. That we do by the identification pattern given by the original decomposition P of C* and the gluing angles given by the limits Oj = limn--rm6:. That gives us the complex structure' Y * of C'. From the construction it follows then immediately that
in
M".This proves the theorem.
5.8
Symmetric Riemann surfaces and real algebraic curves
Next we turn our attention to non-classical compact Riemann surfaces. Their study has its motivation in the fact that non-classical Riemann surfaces are simply complex algebraic curves defined by real polynomials (cf. [S]). This observation justifies the following definition.
Definition 5.8.1 The space of isomorphism classes of smooth non-classical Riemann surfaces M g of genus g is called the moduli space of real algebraic curves of genus g . Alternatively we call the space M i moduli space of smooth non-classical genus g Riemann surfaces. 'This complex structure is not yet uniquely defined by the above data. It is defined up to full Dehn twists around the decomposing curves of the pants decomposition P. In i s uniquely defined, and this ambiguity does spite of this ambiguity, the point [Y'] E not cause any problems.
xg
CHAPTER 5. MODULI SPACES
196
The moduli space of smooth genus g real curves is, for the time being, defined only as a set. Below we will define a topology for this set. Before doing that recall that by Corolla.ry 3.4.2 (on page 78) there are 39
+4
1 7 1 different topological types of non-classical genus g Riemann surfaces. This implies immediately that, in any reasonable topology, the moduli space M i will not be connected, since you cannot change the topological type of a non-classical Riemann surface without doing some violence to it. Recall that by passing to the complex double X c of a non-classical Riemann surface X we may view X as a classical Riemann surface with a symmetry, i.e., with an antiholoinorphic involution (T : X c -+ X c . (For the definition of the complex double see page 77.)
Definition 5.8.2 Let (X,a)and ( Y , T )be stable Riemann surfaces with symmetries (T and T . We say that (X,a)and (Y,T) are isomorphic (or isomorphic over R) if there exists a holomorphic homeomorphism f : X -+ Y such that f o (T = T o f. It is now clear that the moduli space M i can be viewed as the set of isomorphism classes of symmetric and smooth genus g Riemann surfaces. In order to understand the natural compactification of M& it is best to view it as the space of isomorphism classes of symmetric surfaces. The reason is the following observation: Let [X,] E M g be a infinite sequence of isomorphism classes of non-classical smooth genus g Riemann surfaces which does not converge in M g . It may happen that all non-classical Riemann surfaces X, have two boundary components such that the length of one of them (measured in the intrinsic metric) converges to 0 as n -+ 00 and the length of the other one converges to 00 as n -+ 00. This implies that, as n -+ 00, the non-classical Riemann surfaces X, degenerate in two completely different manners. It is also rather hard to understand what this means geometrically. We will, therefore, from now on interpret .Mialways as the set of isomorphism classes of symmetric smooth genus g Riemann surfaces.
Definition 5.8.3 The set xk of isomorphisms classes of symmetric stable genus g Riemann surfaces is called the moduli space of symmetric stable genus g Rieinann surfaces. Alternatively it is called the moduli space of stable real algebraic curves of genus g .
5.9. CONNECTEDNESS OF THE REAL MODULI SPACE
197
Just like in the classical case, the moduli space Mk is a compactification of the moduli space M k . In order to understand this, we have, of course, first to define a topology for these both moduli spaces. The moduli space M& is naturally a subset of We define a topology for Mk which then induces a topology for M i . Here we repeat the construction given for the moduli space Zg. Let c and 6 be positive numbers. We say that the point [(Y,.)] E Mk belongs t o the (c, 6)-neighborhood Uc,s([(X, o)])of a point [(X,o)] if and only if there exists a decomposition P of X into pairs of pants such that the following holds:
n/ik.
1. o ( P )= P . 2. There exists a strong deformation f : Y
+
X such that the following
holds: (a) f o ~ = o o f .
(b) Fenchel-Nielsen coordinates ti, O i , . . .,l$-3,0ig-3 of Y with respect to f*(P)satisfy: i. [ti - ti[ < c for all j = l , 2 , . ..,3g- 3. ii. For all values of j , if L j > 0 then - O:I
< 6.
Here we have used the notation f*(P)to indicate the pants decomposition of Y whose pairs of pants are inverse images of pairs of pants of the decomposition P of X , and Lj and O j are the Fenchel-Nielsen coordinates of X with respect to P . The sets U,,s([X]) form a basis for the topology of
xg.
5.9
Connectedness of the real moduli space
In this Section we show that the above defined moduli space for stable symmetric Riemann surfaces, i.e., the real moduli space of stable real algebraic curves, is connected. The proof presented here is a modification of the arguments of [76], see also [78]. The connectedness of the moduli space is actually an old problem. It was considered already by Felix Klein in [48, Page 81. We start with an almost obvious result.
Mk
Theorem 5.9.1 The moduli space M i is dense in
xk.
Mk
Mk,g >
1, is a Hausdorff space and
Proof. It is immediate that is a topological Hausdorff space. To show we have to show that we can thicken all the that M i is dense in
CHAPTER 5. MODULI SPACES
198
nodes of a symmetric stable Riemann surface (X,u) in a fashion which is compatible with the involution o. That is, indeed, possible. Details are similar to those of (a part of) the proof of Theorem 5.9.3. In order to study M i more closely, assume that integers g, n and k satisfy:
.g>l.
+ 1 (mod 2 ) and n > 0.
0
If k = 0 then n
0
If k = 1 then 0 5 n 5 g .
g
Then, by Theorem 3.4.1 (on page 78), there are symmetric Riemann surfaces (X, n) of genus g such that the number of the components of the fixed-point set of o equals n and k = 2 - #(components of X \ X,). Let
V ( g ,n , k ) = {[(X,o)] EM i
I
invariants of (X,a) equal g , n and k } .
It is obvious, by the definitions, that the sets V ( g , n , k ) are disjoint subsets of Mk for different values of the invariants n and k. Definition 5.9.1 The set V ( g ,n, k) is the moduli space of smooth symmetric Riemunn surfaces of topological type ( 9 ,n,k ) . L e m m a 5.9.2 The space V ( g ,n , k ) is connected, g
> 1.
Proof, Let C be a topological compact non-classical surface of type (9,n,k)2. By Theorem 4.4.1 (on page 147) the Teichmiiller space T ( C ) of the surface C is connected. This implies the connectedness of V ( g ,n,k) in the following fashion. Let C" be the complex double of C. Recall the constructions related to Theorem 4.5.1. The complex double Cc carries an orientation reversing involution u : Cc -+ C" such that C = C C / ( a ) .This involution induces an --* T ( C " ) . By means of the projection R : C" --f u we involution u* : T(C") constructed a continuous and injective mapping R* : T ( C ) + T(C"). By Theorem 4.5.1, R * ( T ( C ) = T(C"),*, (5.7) Equation ( 5 . 7 ) implies now that T(CC),*is connected. Let N ( a * ) be the norrnalizer of n* in r(Cc). It consists of all elements of r(C*) that commute with o*.Then elements of N ( a * ) map a*(T(C)) = 2The surface E has n boundary components, is orientable if I; = 0 and non-orientable otherwise and the ordinary genus of the complex double of E is g.
5.9. CONNECTEDNESS OF THE REAL MODULI SPACE
199
T(C’),,.
onto itself. Since x * ( T ( C ) )is connected, it follows that V ( g ,n,k) = x*(T(C))/IV(a*) is also connected.
n/rk
Theorem 5.9.3 The moduli space of symmetric stable genus g Riemann surfaces, g > l , is a connected Hausdorfl space.
P m f . By Theorem 5.9.1, h4k is dense in
Mk. Hence it suffices to show
that the closure of h4; in Mk is connected. We will achieve this in two steps: 0
0
We show first that the union of the closures of components V ( g ,n, 1) is connected by showing that the closure of each V ( g ,n,l),n > 0, intersects the closure of V ( g ,0,l). Next we show that the closures of V ( g ,n, 0) and V ( g ,n - 1 , l ) always intersect for all possible values of n.
Consider now a coxnponent V ( g ,n, l ) , n > 0. To show that the closures of V ( g ,n, 1) and V ( g ,0 , l ) intersect we construct a point [(X,u)]that lies in the closures of both of them. To that end, let XObe the Riemann sphere punctured at the g + 1 points 0 , 1, 2 , . . ., g . Let Xi be the complex conjugate of XO,i.e., if z is a local coordinate of X o , then Z is that of Xi. Let X be the stable Riemann surface obtained by identifying the punctures 0, 1 , . ., g of XO with those of X,. The identity mapping induces an antiholomorphic mapping XO -+ Xi which, in turn, induces a symmetry o : X + X. We conclude that (X, CT) is a stable genus g Riemann surface. The stable Riemann surface X has two parts, they correspond to the punctured spheres XO and Xi. For notational convenience, call these parts X1 and X2. The symmetry u maps X Ionto Xz. Next we show that the point [(X, u)]lies in the closures of V ( g ,0 , l ) and V ( g ,n,1). To that, let 6 > 0 and S > 0 be arbitrary. We constructs a point of V ( g ,0 , l ) and another one of V ( g ,n, 1) which both lie in the U,,s([(X,u ) ] ) neighborhood of the point [(X, u ) ] . To that end, take first g - 1 pairs of pants PI, P2, . . .,Pg-l such that all boundary geodesics have length € 1 2 . identify a boundary component of Pj with a boundary coxnponent of Pj+l for all indices j = 1 , . . , g - 2 . Do the identifications in such a manner that the corresponding base points always agree. In this way one obtains a Riemann surface Y’ with ( g - 1) 2 = g 1 boundary components. Let Y'' be the complex conjugate of Y’. As above, we form the Riemann surface Y by identifying the boundary points of Y' with the corresponding
.
.
+
+
CHAPTER 5. MODULI SPACES
200
points of Y". The identity mapping of Y' induces then an antiholomorphic mapping Y' -+ Y" which, in turn, induces a symmetry u : Y Y. The Riemann surface Y is, of course, smooth. The point [(Yu)]lies in the component V ( g ,g 1,O). Next we deform the complex structure of Y in such a way that we get the desired points of V(g,O,1) and of V ( g , n ,1). This is a delicate part of the argument and is based on the considerations of Section 3.7 (starting on page 93). Let 011, a2,. . ., ag+lbe the closed geodesic curves of Y corresponding to the boundary geodesics of the Riemann surface Y'. Assume that the curves aj are oriented in such a way that they are positively oriented3 as boundary curves of Y'. Let k = g 1- n, and let Yk be the Riemann surface obtained from the Riemann surface Y be performing left Dehn twists along the curves ~ 1 ,...,crk. For the definition of the left Dehn twist see page 95. Recall now the construction of the mapping fa given in Definition 3.7.1 on page 94. Considering carefully the construction one concludes that
+
+
the homotopy class of the mapping fa, o fa, 0. an antiholoinorphic involution T : Yk Yh.
-
- 0 fak
ou contains
--f
It is immediate4, by the definition of fa,, that the symmetric Riemann surface (Y,T ) is of type ( 9 , n, l),i.e., that [ ( Y T, ) ] E V ( g ,n, 1). It follows, also directly from the definitions, that [(Y, T)] E UL,6([(X, u)]).This argument shows that the point [(X,u)]lies in the closure of V ( g ,n, 1). Replacing, in the above construction, k by g 1 one shows that [(X,u ) ] lies also in the closure of V ( g ,0 , l ) . This completes the proof of the first part. Observe that in the above we actually showed that the point [(X, u)]lies in the closures of the components V ( g , n ,l), V(g,O,1 ) and V ( g , g l , O ) , i.e., that also the closures of V(y, g t 1,O) and V ( g ,0 , l ) intersect. In order to show that the closure of V ( g ,0 , l ) intersects the closures of all the components V ( y , n , O ) 0, < n 5 g 1, n = g 1 (mod 2), we repeat the above argument by replacing the punctured sphere Y' by a Riemann surface of genus ( g 1 - n ) / 2 from which n disks (with disjoint closures) have been removed. (Here we repeat the construction of Section 3.7 starting on page 93.) Details are, word by word, same as in the above considerations. This completes the proof.
+
+
+
+
+
-.
The main point in the above proof is that the involutions T x fal o f a , o u and u are not homotopic to each other. The composition T O
o
- 0fa,
3Any orientation will do. For technical convenience we have to fix some orientation. 'Details here are exactly the same as in the considerations following Definition 3.7.1 on page 94.
5.10. COMPACTNESS OF THE REAL MODULI SPACE
201
-
is, of course, homotopic to the product of Dehn twists fal o f a 2 o .. o f a , . As a self mapping of the smooth surface C this product of Dehn twists is not homotopic to the identity and is of infinite degree. If one deforms the surface C in such a way that the closed curves al,...,crk get pinched t o nodes, then the mapping fal o fa2 o -.. o fa, induces a self-mapping of this deformed surface which is homotopic to the identity. It only turns the nodes around.
5.10
Compactness of the real moduli space
We use Theorem 5.9.1 and study the moduli space Mk as the union of the closures of the parts: V ( g ,n, k) = {[(X, u)]E M”,X
smooth, n ( u ) = n, k(u) = k}.
We will first show that the closure of each V ( g ,n , k) is compact in M k . The proof of the compactness is an extension of the arguments presented in Section 5.7 for the classical case and relies on Theorem 3.19.1 (on page 131). Observe especially, that the following result follows immediately from the definitions.
Lemma 5.10.1 The projection
is continuous.
We will have to deal with several different symmetries of the surface C. To make this distinction clear we write sometimes (C, X,u) to denote the symmetric Riemann surface X = ( C , X ) together with the symmetry u : ( C , X ) + ( C , X ) which is then an antiholomorphic involution.
Theorem 5.10.2 The closure of V ( g ,n, k) in M
i
is compact.
Proof. Let u : C -+ C be an orientation reversing involution, k ( a ) = k and n ( u ) = n . Let ([(C,X,,a)]),be an infinite sequence of points of V ( g , n , k ) in
xk. It suffices to show that there exists a subsequence ([(C, X,,
7
u>1)
that converges in %&. We shall, at various stages of the proof pass from a sequence t o its subsequence. To keep the notation as simple as possible we use the same
CHAPTER 5. MODULI SPACES
202
notation for a sequence and its suitable subsequence when there is no danger of confusion. Use first Theorem 3.19.1 (page 131) to find, for each index n, a decomposition P, of C into pairs of pants in such a way that each decomposing curve a3 of each pants decomposition Pn has length < 219 on ( C , X , ) . By Theorem 3.19.1 we can furthermore choose these pants decompositions Pn in such a way that, for each n, .(Pn) = Pn. There are only finitely many topologically different decompositions of the surface C into pairs of pants. Therefore we may - by passing to a subsequence - assume that there is a fixed decomposition P of C into pairs of pants and orientation preserving homeomorphisms f n : C + C such that f,(P,) = P for each n. Let Y, be that complex structure of C for which the mapping fn : (C, X,) -, (C, Y,) is holomorphic. Let T, = f, o c o f;'. Each mapping T, : (C, Y,,) + (C, Y,) is then an antiholomorphic involution. Furthermore, T,(P) = P for each R . Up to Dehn twists around the decomposing curves of the pants decomposition P there are only finitely many different involutions 7, that map P onto itself. Therefore we may assume - by passing again to a subsequence and choosing the mappings f n in a suitable way - that all the involutions r, agree. Let T = T,, for all values of n. After these choices we have a. decomposition P of C into pairs of pants and representatives (C,Y,,.) for the points [ ( C , X , , c ) ] in Mk such that the following holds:
1. T ( P )= P . 2. Each
T
: (C, Y,)
+
(C, Y,) is an antiholomorphic involution.
3. Each decomposing curve crj, j = 1 , 2 , . . .,3g - 3, of the pants decomposition P is of length < 219 on the hyperbolic Riemann surface (C, Yn). Let l?, e?, j = 1,2,. ..,3g - 3, be the Fenchel-Nielsen coordinates of Y, with respect to the pants decomposition P. Then by the above mentioned property 3, we have e? < 219 for each j and n. Also we have 0 5 0: < 27r. Therefore - by passing again to a subsequence - we may assume that all the sequences l?;,e!, lg, . . . and O f , B j , Og,. . . converge. Let l , = limndm ly and Oj = liin,-,m 03, j = 1 , 2 , . . .,3g - 3. We deform next the surface C in the following fashion. If l j = 0 then we replace the decomposing curve aj of the pants decomposition P by a node. Do that for each j with lj = 0. That construction yields a stable surface C* of genus 9. The identity mapping C -+ C induces a strong deformation f : C + C*.
5.10. COMPACTNESS OF T H E REAL MODULI SPACE
203
By the above mentioned properties 1 and 2 of the representative (C,Yn, 7) we deduce that r induces an orientation reversing involution T : C ’ +C ’ . Also the decomposition P of C into pairs of pants gives a similar decomposition P of C* into pairs of pants. On C* define a complex structure Y' by the Fenchel-Nielsen coordinates e j and 0, with respect to the decomposition P of C' into pairs of pants. That complex structure Y * is uniquely defined up to Dehn twists around those decomposing curves aj of P that are not nodes and up to deformations by mappings homotopic to the identity mapping in each pair in each pair of pants belonging to P. The diagram
commutes. Here f : (C,Y,) + ( C * , Y * )is a strong deformation and each mapping T : (C,Y,) + (C,Y,) is an antiholomorphic involution mapping P onto it self. Consider next the decomposition P on C into pairs of pants as an miented decomposition. That gives an orientation also for the decomposition P of C* into pairs of pants. The mapping r maps each pair of pants belonging to P onto some other (or possibly the same) pair of pants in P. Therefore, as oriented decoinpositions of C into pairs of pants r ( P ) and P are different. Since each mapping T : (C, Y,) (C, Y,) is antiholomorphic, the FenchelNielsen coordinates of Y, with respect to the oriented pants decomposition T ( P )are obtained by a permutation of the coordinates e? and the coordinates 07 and by possibly replacing some of the coordinates 0: by the coordinates 27~- 0:. Observe that the coordinates of Y, with respect to r ( P ) are always obtained from the coordinates of Y, with respect to P by the same continuous transformation which does not depend on n. We conclude, by continuity, that also the coordinates of Y' with respect to the oriented pants decomposition r ( P ) are obtained by the same transformation from the coordinates of Y* with respect to the pants decomposition P. Then we conclude that by deforming the complex structure Y' by additional Dehn twists around some of the decomposing curves aj that are not nodes of C*, and by deforming Y * in each pair of pants of P by a mapping homotopic to the identity mapping, we may actually suppose that the mapping r : ( u * ,Y') + (C*, Y * )is an antiholomorphic involution. Details here are easy but tedious. Therefore (C", Y ' ) defines a point in Mk. --f
CHAPTER 5. MODULI SPACES
2 04
From the construction it follows then immediately that
[(C,Xn)I in
--$
“C*,Y*)l as n
-+
0
Mk.This proves the theorem. By Theorem 5.9.1,Mk is the closure of M i . The moduli space M g is, R
on the other hand, the union of finitely many components V ( g ,n,k). Since, by Theorem 5.10.2,each one of them has compact closure in M&,also the closure of M& in n/r& is compact. That remark proves the main result of this Section:
Theorem 5.10.3 The real moduli space of symmetric genus g Riemann surfaces, ZL, is compact for g > 1.0 Observe that in the above we have considered only the case of hyperbolic Riemann surfaces, i.e., we have assumed everywhere that g > 1. The results hold also in the case of genus 1 or 0 Riemann surfaces but have to be shown by the methods of Section 5.3. The case of symmetric genus 0 Riemann surfaces is trivial, since, in that case, the moduli space reduces to a set of two points.
5.11
Review on results concerning the analytic structure of moduli spaces of compact Riemann surfaces
The focus of this monograph has been on that part of the theory of Teichmuller spaces that can be derived studying multipliers of Mobius transformations. That leads to parametrizations of Teichmuller spaces by geodesic length functions. These are real analytic parameters, while the Teichmiiller space of genus g compact Riemann surfaces is actually a 39 - 3 dimensional complex manifold. Teichmuller spaces of non-classical surfaces are only r e d analytic (and not complex) manifolds, but the complex structure of the clas-. sical Teichmuller spaces plays an important r6le in this non-classical theory. For that reason we provide, in this Section, a review of this complex theory. Everything here will be presented without proofs, but exact references will be given. During recent years three excellent monographs, which treat the complex analytic theory of Teichmuller spaces, have appeared. They were written by Fredrick P. Gardiner ([32]),Olli Lehto ([60]) and by Subhasis Nag ([SS]). Especially the above cited monograph of Gardiner and that of Nag give a good introduction the modern parts of this complex theory.
5.11. ANALYTIC STRUCTURE OF MODULI SPACES
205
On page 148 we have described the complex structure of the Teichmuller space of compact smooth genus g Riemann surface, g > 1. Main result concerning the complex structure is Theorem 4.4.2 (on page 148), which states that the Teichmuller space Tg of compact genus g , g > 1, Riemann surfaces is a complex manifold of complex dimension 39 - 3. By the constructions related to the complex structure it is easy to see that elements of the modular group are holomorphic automorphisms of the Teichmiiller space of compact genus g Riemann surfaces. Royden has shown (in [71] and in [72]), furthermore, that the modular group is, for g > 2, the full group of holomorphic automorphisms of Tg. Using this result one can draw some conclusions concerning the structure of the moduli space. To that end we need the following theorem of Henri Cartan [24, Th6orBme 11 :
Theorem 5.11.1 Let X be a complex manifold and G a properly discontinuous group of holomorphic automorphisms of X . The quotient X / G is a normal complex space. The normality is a condition concerning the singularities of the moduli space. This result simply means that the singularities are not too bad. By Theorem 4.10.5 (on page 163), the modular group I'g acts properly discontinuously on the Teichmuller space Tg. Since elements of the modular group are holomorphic automorphisms of Tg, Theorem 5.11.1 implies:
Theorem 5.11.2 The moduli space M g , g > 1, of smooth compact genus g Riemann surfaces is u normal complex space. By means of the Geometric Invariant Theory algebraic geometers, David Mumford, Walter L. Baily, David Gieseker, Finn Knudsen and others, have shown a stronger result ([50][511 ,[52]$351, [66] ,[67], [68], [38]):
Theorem 5.11.3 The moduli space, M g , of smooth compact genus g Riemann surfaces, g > l, is a quasiprojective algebraic variety. Its compactification Mg is u projective algebmic variety. This is one of the most important results in the theory of Riemann surfaces and algebraic curves. After the success of the Geometric Invariant Theory in compactifying the moduli space and studying its structure a natural problem was to prove the same results using Teichmuller theory. That this is possible was announced as early as in 1973 ([ll]). The details turned out to be difficult. Concerning the compactification it was, for many years, possible to prove, using exclusively Teichmuller theory, only that the moduli space of stable
206
CHAPTER 5. MODULI SPACES
Riemann surfaces of a given genus is a compact Hausdorff space (Theorem 5.11.2 above). Ideas to this proof are due to Lipman Bers and appeared already in [ll]. For another account of these facts see also the notes of Joe Harris ([37]). To prove, using arguments of analytic geometry, that the moduli space of stable Riemann surfaces is a projective variety, took much longer. First geometric proof for this fact is due to Scott Wolpert ([loll). Recently Frank Herrlich ([41]) has been able to complete the original arguments of Bers ([I 11) completing this line of investigations. In view of the rich complex analytic theory of Teichmiiller spaces and moduli spaces of classical Riemann surfaces, it is natural to ask what can be said about the possible analytic structure of the Teichmiiller spaces and the moduli spaces of non-classical Riemann surfaces. Let C be a non-classical topological surface and C" its complex double. Then C" has an orientation reversing involution u : Cc -+ Cc such that C = X c / ( u ) .Recall that by Theorem 4.5.1 (on page 149) we may identify the Teichmuller space T ( C )of the non-classical compact surface C with the fixed-point set T(C'),. of the induced involution u* : T(C")+ T ( C C ) .This involution is antiholomorphic. Locally the involution u* can be modelled as the complex conjugation in C3g-3. Since the fixed-point set of such an antiholomorphic involution is always a real analytic manifold we have:
Theorem 5.11.4 The Teichmiiller space of a non-classical compact surface C of genus g , g > 1 , is a real analytic manifold of real dimension 39 - 3 Next question is what can be said about the moduli space M i of nonclassical Riemann surfaces of genus g . We consider here only the general caseg > 1 . In [79, Theorems 2.1 and 9.31 (see also [75]) Mika Seppda and Robert Silhol have shown the following result:
Theorem 5.11.5 Components of the moduli space M&, of non-classical Riemann surfaces of genus g , g > 1, are semi-algebraic varieties and imducible real analytic spaces. Let x : Mg + M gbe the mapping that forgets the real structure. We observed above that the moduli space MYis a complex projective variety and a normal complex space. Another natural problem is to study the structure of T ( Zin~Zg. ) To that end, recall that the moduli space MYof genus g compact stable Riemann surfaces can be viewed as the moduli space of stable complex algebraic curves. Likewise, M i is the moduli space of stable real algebraic curves. Let T :MY+ MYbe the mapping that takes the isomorphism class
5.11. ANALYTIC STRUCTURE OF MODULI SPACES
207
of a complex algebraic curve onto that of its complex conjugate. Using techniques described in [67] it is possible to embedd M ginto a complex projective space PN(C) in such a way that the diagram
Mg,
+
MY
I.
lfd
Mk
+
MY
L*
-
PN(C) lcompl. conj. PyC)
(5.10)
is commutative. This means, in particular, that
where
(M“)T denotes the fixed-point set of MYand
Mg(R) is the set of real points of subset of PN(C).
the involution r : MY-+ M , we have interpreted M g as a
- Regarding diagram (5.10) Clifford Earle showed in [26] that Mk # Mg(R). Another proof and a direct construction for this fact has been given by Goro Shimura in [84]. Earle’s proof uses Teichmiiller theory while Shimura gives an explicit family of polynomials that define complex algebraic curves, with real moduli, that are not real curves. This observation has been a motivation in the study of the properties of the moduli space
Mk. In [78] Mika Seppala has shown:
Theorem 5.11.6 Assume that g > 3 . The image n ( M k ) of Mg in MYis a connected semialgebraic variety and the quasi-regular real part of MY. Recall that the quasi-regular real part, as defined by Aldo Andreotti and Per Holm in [9], consists of those points ofMY(R)where the local dimension of x g ( R )is maximal. This result has recently been extended to the case g = 3 by Robert Silhol (see [SS]). In that pepr Silhol has also shown that the result cannot be extended ot the case g = 2. Silhol has also extensively studied moduli problems of real abelian varieties and obtained important results for them. Observe that Theorem 5.10.2 implies that n(ML) is a compact subset of MY. We can characterize T(%&) as the subset of MY consisting of isomorphism classes of those Riemann surfaces X on which Zz = Z/2Z acts via an antiholomorphic involution. This formulation leads to the following generalization. Let G be a finite group. Set M $ = {[XI I G c IsomX}. (5.11) Here IsomX denotes the isometry group of X. Theorem 4.1 of my other lecture in this volume means that it is not possible to use the construction of Sections 1 - 3 to study this set % : in the general case.
208
CHAPTER 5. MODULI SPACES
In the general case MG is not compact. It is an interesting problem to characterize the closure of ML in Zg. We conclude this Section by the following remarks. The modern generalizations of these arguments to moduli problems of real algebraic geometry were started by Clifford Earle ([26]) and by Goro Shimura ([84]). Earlier these moduli problems were extensively studied by Felix Klein (cf. e.g. [46]). These investigations were continued independently by S. Natanzon ([70]), Mika Seppala (see e.g. [77] and [78]), Robert Silhol (see e.g. [88])and jointly by Seppala and Silhol ([79]).
Appendix A
Hyperbolic metric and Mobius groups A.l
Length and area elements
The Mobius transformation g(2) =
az+b bz+ii
7
with 1aI2 - lb12 = 1 maps the unit disk D = { z E C I 1 1 1< 1) conformally onto itself. For 21,z2 E D let wj = g(zj), j = 1,2. From (A.l) we get
and
1 -m1w2 =
1-7122
(671
+
.)(5~2
+ E)
Hence
Letting z1 approach 2 2 (A.2) becomes
-Id4
1 - 1212
-
Id4 1 - lW12’
This shows that the Riemannian metric whose element of length is
209
210 APPENDIX A . HYPERBOLIC METRIC A N D MOBIUS GROUPS is invariant under conformal self-mappings of the unit disk. In this metric every rectifiable arc y has the length
and every measurable set E has the area
Jl,
(ly:;)2-
The metric defined by the line element (A.3) is called the hyperbolic metric of D . In this metric the shortest arc from 0 to any other point is along the radius. Hence geodesics are euclidean circles orthogonal to dD = { z E C I IzI = 1). Such geodesics are also called h-lines or hyperbolic lines. D together with the hyperbolic metric is called the hyperbolic plane. Let .(z) = 2/(1- 1 ~ 1 ~ ) Then . the Gaussian curvature of the hyperbolic metric is
The constant 2 was added in (A.3) in order t o get a metric of constant curvature -1. Generally speaking any Riemannian metric of curvature -1 is called hyperbolic. The hyperbolic geometry can also be carried over to the upper halfplane U = { z E C I Im z > O}. The element of length that corresponds to (A.3) is
The upper half-plane together with this metric is another model for the hyperbolic plane. Sometimes it is more convenient t o work in U instead of D. Therefore we frequently switch back and forth between these two hyperbolic planes. The hyperbolic distance from 0 to T > 0 is
2dr J, -=log-
1-l-r 1-r'
For the hyperbolic distance d D ( z1, z2) of arbitrary points the formula l+t b ( z 1 , .2) = 1% 1 - 7 where t = Iz1 - z21/11 - 21221. A similar formula with
holds for the hyperbolic metric of the upper half-plane.
z1,z2
E
D we have
(A4
A.2. ISOMETRIES OF T H E HYPERBOLIC METRIC
A.2
21 1
Isometries of the hyperbolic metric
By (A.2) all Mobius-transformations mapping the unit disk onto itself are isometries of the hyperbolic metric. Conversely, let f : D -+ D be an isometry of the hyperbolic metric. We want t o show that f is either a Mobiustransformation of the complex conjugate of a Mobius-transformation. To that end consider, in the stead of f , the mapping
Then F is an isometry as well and it maps the interval [0,1] onto itself keeping the origin fixed. It suffices to show that F is either a Mobiustransformation or the complex conjugate of a Mobius-transformation. Let C, denote the euclidean circle { z E C I 1.1 = r } for 0 5 T 5 1. Observe that C,. is a circle in the hyperbolic metric as well. Since F is an isometry of the hyperbolic metric and since F ( 0 ) = 0, F ( C , ) = C, for each T.
Let reiq be an arbitrary point of C,. Then F maps the arc of C,. with end-points T and z = reiq onto some arc with end-points T and reiqf(4. F being an isometry of the hyperbolic metric these two arcs must have the same hyperbolic length. We conclude that either ' ~ f ( ~ ) = corp c p f ( * ) = -cp for each z = re'q. Since F is continuous we conclude then that either vj(Z) = cp or cpj(z) = -9 for all z = re'q E D . This proves the following result:
Theorem A.2.1 The group of isometric self-mappings of the hyperbolic unit disk D is the group of conformal or anticonformal self-mappings of D .
A.3
Geometry of the hyperbolic metric
A ray from a poizat z in the hyperbolic plane is an infinite arc on a h-line with an end-point z. Angles in the hyperbolic plane can be defined just like angles in the Euclidean geometry; they are bounded by two hyperbolic rays starting from one point. Angles can be measured just like angles in the Euclidean geometry. It follows that hyperbolic angles are euclidean angles. The following properties of the hyperbolic metric follow easily from the above: a
Hyperbolic circles are Euclidean circles but their centers do not usually coincide.
a
There is a unique 11-line through any two distinct points of the hyperbolic plane.
212 APPENDIX A . HYPERBOLIC METRIC AND MOBIUS GROUPS
Figure A.1: Points whose distance from 1 is at most 0
0
0
T.
Two distinct h-lines intersect in at most one point of the hyperbolic plane. Given any two h--lines It and s ( 4 ) = 12.
12,
there is an isometry g such that
Given any h-line 1 and any point z , there is a unique h-line through z and orthogonal to 1.
The distance of a point z froin a h-line 1 is measured along the unique h-line through z perpendicular to 1. The imaginary axes 1 is a h-line in the upper half-plane. Computing by (A.6) we conclude that the set of points of U which lie a t a given distance T from 1 consists of two euclidean rays starting froin the origin and forming equal angles with 1. Let cp be that angle. One computes further that T + 00 as cp + 7~12. Let d"(z,l) denote the distance of the point z from the h-line 1. We conclude that for an arbitrary h-line 1 in U the set {z
E
u I dv(z,l) < .I
is the crescent in figure (A.1). Let D, be the disk of hyperbolic radius T with center at the origin of the hyperbolic unit disk D. Then D, is also an euclidean,disk. Its euclidean radius R equals R = arctanh(r/2) by (A.6). Straightforward integration then gives the following result.
Theorem A.3.1 The hyperbolic area of a hyperbolic disk of mdius 2lr(coshr - 1). The hyperbolic length of a hyperbolic circle of mdius 27~sinhT .
T T
is is
Observe that the area of the hyperbolic disk D , can also be expressed as 4asinh2 ( ~ / 2 ) .
A.4. MATRIX GROUPS
A.4
213
Matrix groups
Denote by M ( n , R) the real vector space of real n x n matrices all
a12
..-
an1
an2
* * *
A= ann
The linear mapping R” -+ Rn defined by A is bijective if and only if det A 0. In this case A is nowsingular and the inverse matrix A-’ satisfies
#
where Sjj is the Kronecker symbol. Denote by GL(n, R) (“General Linear Group”) the group of real non-singular n x n-matrices. The complex vector space of complex n x n-matrices A = (a;j) is denoted by M ( n , C).Also in this case A is non-singular if and only if det A # 0. Let GL(n, C) denote the group of complex non-singular n x n-matrices. In a natural way, G L ( n , R ) is a subgroup of GL(n, C). If A, B E M ( t a , C ) ,then det(AB) = det A det B = det(BA). If A E GL(n, C), then det A det A-’ = 1 and det A-’ = (det A)-’. cially, det(ABA-I) = det(AA-’B) = det B.
Espe-
It follows that matrices A E GL(n, C) with det A = 1 constitute a group. This subgroup of GL(n, C) is denoted by SL(n, C) (“Special Linear Group”). Similarly, SL(n,R) = {A E G L ( n , R ) I d e t A = l} is a subgroup of GL(n, R). Moreover, SL(n, R) C SL(n, C). Example. Let A = E GL(2, C). Then we have det A = a d - bc #
(
0. If A-’ =
(;
)
$),then
aa+by ap+b6 c a + dy c p + d S
214 APPENDIX A. HYPERBOLIC METRIC AND MOBIUS GROUPS and hence
(
)
Let I = E SL(2,C) and -I = ( - I ) A = - A for all A E M(2, C ) . Denote
( -,,’
!l
).
Then A ( - I ) =
N = { I , -I}. Since I 2 = I, ( - I ) 2 = I and I ( - I ) = (-1)1 = - I , N is a subgroup of SL(2,C). Moreover, since AIA-’ = I and A(-I)A-’ = - I for all A E SL(2, C), N is a normal subgroup of SL(2, C ) and of SL(2, R). The quotient groups SL(2, C ) / N = PSL(2, C), SL(2, R)/N = PSL(2, R)
(“Projective Special Linear Group”)
consist of equivalence classes ( A ,- A ) , A E SL(2, C). The vector space M ( n , C ) can be identified with the euclidean space c n x n . Hence M ( n , C) has a natural topology. The E-neighbourhood of the matrix A = ( a i j ) consists of the matrices B = ( b ; j ) for which
The same topology is obtained if E-neighbourhoods are defined by the metric
If Ak = ( a i j ( k ) )and A = ( u i j ) , then
Hence the mapping det : M ( n , C ) + C , A
H
detA, is continuous. For
A = ( a i j ) E M ( n , C ) , let
Then also the mapping tr : M ( n , C ) -, C is continuous. We have seen that GL(n, R), SL(n, R), GL(n, C ) and SL(n, C ) are both groups and topological spaces. Moreover, A,’
+ A-’
and An& -+ A B
A.4. MATRIX GROUPS
215
whenever An + A and B n + B . Generally, let G be an arbitrary group. Suppose that G is also a topological space. If the mappings
x
H
z-’
(G-tG)
Z Y (G x G
(X,Y)
+
G)
are continuous, then G is a topological group. Suppose that every point x E G has a countable base of neighbourhoods. Then the mappings H z-l and (x,y) H z y are continuous if z ; ’ + z-’ and znyn + z y whenever x , + x and yn + y. Hence all subgroups of GL(n,C) and SL(n,C) are topological groups. For any y E G , the space G x {y} has a natural topology whose open sets are of the form A x {y}, A c G open. Then the mapping z H (x, y) is a homeomorphism G G x {y}, and the mapping (x,y) H z y is a continuous surjection G x {y} -+ G. The composition --f
5
ZY
is a continuous surjection G -+ G whose inverse x Hence we have
H
xy-’ is continuous.
Theorem A.4.1 Let G be a topological group. Then for every y E S, the mappings z I+ z y and x H yx are homeomorphisms G + G .
Definition A.4.1 A topological group G is discrete if the topology of G is discrete, i.e., if all subsets of G are open. Theorem A.4.2 Let G be a topological group. Suppose there exists g E G such that { g } is open. Then G is discrete.
Proof. Let y E G. Since the mapping x set { g ( g - ' y ) } = {y} is open. o
H
x(g-’y)
is homeomorphic, the
Let H c G be a normal subgroup. We state without a proof that the quotient group G / H becomes a topological group if it is equipped with the topology co-induced by the projection map G + G / H . In the following, we shall consider subgroups of M ( 2 , C). Let
P : SL(2, C)-+ PSL(2, C) by the projection for which P ( A ) = P ( - A ) . Then P is locally injective. If PSL(2,C) is equipped with the topology co-induced by P and if A E PSL(2,C) and P-'(A) = { A l , A z } , then A has a neighbourhood U such
216 APPENDIX A . HYPERBOLIC M E T R I C AND MOBIUS GROUPS
that P-'(V) consists of disjoint neighbourhoods of A1 and Az. Moreover, PSL(2, C) and SL(2, C) and all their subgroups are topological groups. By the above definition, a topological group G is discrete if G contains no accumulation points, i.e., if the conditions
A,,A€G
A,+A;
always imply that there exists an no such that A , = A for all n 2 no. We show next that a discrete group G C SL(2,C) has in fact no accumulation points in SL(2, C).
Theorem A.4.3 Let G c SL(2,C) be a group. Then G is discrete if and only if the conditions
A,
+
A and A , E G, A E M ( 2 , C )
always imply that there exists an no such that A , = A for all n 2 no. Proof. Suppose that G is discrete. Let {A', A 2 , . ..} c G and A E M(2, C ) such that A , + A . Since
1 = clet A,
+
det A ,
we have det A = 1, i.e., A E SL(2, C). Since SL(2, C) is a topological group,
A;'
i
A-' and T, = A,'A,+1
+ A-'A
=I.
Since T,, E G , there exists an no such that n 2 no
+-T, = I.
Then A,, = An,+' = Ano+2 = . . .. Since A , + A , we have A, = A for all n 2 no. Conversely, suppose that the conditions of the theorem hold. Let { A l , A 2 ,..., A } c G such that A , + A . Then there exist an no such that A , = A for all n >-no. Hence G is discrete. Let G c PSL(2, C) be a group and let A, E G. Suppose that we can choose A,, E P-'(A,&)such that A, + A E M(2, C ) . Since A, E SL(2, C ) , we have A E SL(2, C ) by the preceding proof. Moreover,
A;'
+
A-' and T, = A,'A,+l
+
I.
Suppose that the matrices A , are distinct. Then the sequence T, contains infinitely many distinct elements since otherwise T, + I would imply that T, = I and A , = A,+1 for n 1 no. Since P ( T , ) E G and P(T,) P(I) E G, the group G would have P ( 1 ) as a accumulation point. Then G would not be discrete. Conversely, if no sequence A , -+ A of the above type can be found, the group G is discrete. Hence Theorem A.4.3 has the following corollaries: --.)
A.4. MATRIX GROUPS
217
Corollary A.4.4 A group G C PSL(2,C) is discrete if and only if the conditions A , + A, P ( A , ) E G and A E M(2, C) always imply that there exists a n no such that A , = A for all n 2 no. Corollary A.4.5 Suppose that G C PSL(2, C) is not discrete. Then there exists a n infinite sequence A , E SL(2, C ) , n = 1, 2, ..., of distinct elements such that P ( A , ) E G and A , I. --f
Consider discreteness of a group G c SL(2, C). By Corollary A.4.2, it suffices t o find a point A E G such that the set { A } is open. For instance, it suffices to show that { I } is open, i.e., inf{ IIX - Ill
I X
E G,
X # I } > 0.
In other words, it suffices to show that the conditions A , + I , A , E G, imply that A , = I for all n 2 no. Theorem A.4.6 A group G
is finite for all t
c SL(2, C) is discrete i f and only if the set
> 0.
Proof. If the set in question is finite for all t > 0, then G has no accumulation points and G is discrete. Suppose conversely that the set { A E G IlAll 5 t } is infinite for some t > 0. Let A l , A2, ..., E G be distinct elements such that llAnll 5 t. If
I
( %; 2 ), and, -
= 1, then lanl I t , lbnl 5 t , lcnl 5 t and ldnl 5 t. Hence the sequence a, has a convergent subsequence ani, the sequence bni has a convergent subsequence and so on. Therefore, we may assume that
A, =
an C,
(
+
a,
bn
y, d ,
-+
-+
P, 6.
),
f then A , + A . Since the matrices A , are distinct, G is not discrete by Theorem A.4.3.
If A =
(:
Example. The modular group consists of all matrices A = : ) € SL(2,R) for which a , b , c , d are integers. By Theorem A.4.6 the modular group is discrete. The Picard group consists of all matrices A = E S L ( ~ , C for ) which a, b, c and d are complex integers, i.e., of the form m ni where m and n are integers. Also the Picard group is discrete.
(
:)
+
218 APPENDIX A . HYPERBOLlC METRIC A N D MOBlUS
A.5
GROUPS
Representation of groups
Let X be a non-empty set and let F ( X ) be the set of all bijections f : X --f X. Then F ( X ) is a group whose group operation is the composition of transformations. The transformation group F ( X ) is said t o act in X . Let G be a subgroup of F ( X ) . A homomorphism cp : G + GL(2, C ) is a representation of G . If y is injective, the representation is faithful. In this case we have an isomorphism y :G
--f
cp(G) C GL(2,C).
We shall also consider representations y : G + SL(2,C) and cp : G + PSL(2, C). Let X = C be the extended complex plane and let G1 be the group of all translations S, : z H z w, w E C. Then
+
If we interpret S, as a linear fractional transformation of the form (az + b)/(cz
+ d ) , then
Sw(z)= z
+ w = lo-. zz ++ 1w'
Hence we obtain a mapping cp : G1 + SL(2, C ) for which
Clearly, y(S;') = (y(S,))-' and y(S,, 0 S,,) = y(S,,)y(S,,). Hence cp is a representation of G1 in SL(2, C). Moreover, y is faithful since
i.e., kercp = {id}. Secondly, let G2 be the group of all stretchings Vk : z Since v k ( z ) = kZ =
&+O o . z + 1/&'
we define now y : G2 -+ SL(2,R) by setting
H
hz, h
> 0.
A.5. REPRESENTATION O F GROUPS
219
Again, cp(V;') = (cp(Vk))-' and v(V&0 Vk2)= c p ( V ~ , ) c ~ ( vIt , ~f)o. ~ o w s that cp is a faithful representation of G2 in SL(2, R). Thirdly, let GJbe the group of all rotations 1<8 : z H
= Ks, if and only if
Note that
ei8z.
191 G 192
(mod2n). Since
ei8J2z+ o
I N 4 = 0.
+
e-i8/2
7
we define
Then
SL(2, C ) but a mapping This shows that does not define a mapping G3 ---f PSL(2, C ) . Hence G3 has a faithful representation in PSL(2, C ) . Let ( F , be a group. If S is a set of generators of F , then every f E F has a representation f = XE'XC2 .* . p (A.7) 1 2 --f
GS
a )
.
where 21,. ..,z, E S and ~ 1 , . .,E, = f l . An expression of the form (A.7) is called a word and the set 5' is called a n alphabet. This representation of f as a word is not unique. By using normal rules of algebra, we get either the empty word or a representation of the form (A.7) such that zZi # i = 1,. . . ,n - 1. Even this reduced representation of f need not be unique. The neutral element e of F has always the empty word as a reduced representation. There exist groups whose neutral elements have no other reduced representations than the empty word.
xriy',
Theorem A.5.1 Every f E F has a unique reduced representation if and only if the neutral element of F has only the empty word as a reduced representation. The group F is free if it has the property of Theorem A.5.1. More precisely, the definition can be formulated as follows.
Definition A.5.1 Let S be a set of generators of a group F . If every mapping of S into an arbitrary (Abelian) group G can be extended to a homomorphism F 4 G , then F is a free (Abelian) group and F is generated freely by 5’.
220 APPENDIX A . HYPERBOLIC METRIC A N D M6BIUS GROUPS Example. F = ({-1, l}, .) is a group whose neutral element is 1 and where -1 is its own inverse. The set S = (-1) generates F . To show that F is not generated freely by S , let G = (Z,+) and define cp : S +. G by y(-1) = -1. Suppose that cp : F -+ G is a homomorphic extension. Then y ( 1) = 0 since 0 is the neutral element of G. Hence
0 = p(1) = p((-1) +l)) = p(-1) t y(-1) = -1 which is impossible. Note that (-1)+'(-1)+' of 1.
+ (-1)
=2
is a reduced representation
A proof of the following theorem can be found in standard textbooks of algebra (see [61] or [ 5 6 ] ) . Theorem A.5.2 (Nielsen-Schreier) Subgroups of a free group are free groups. Theorem A.5.3 (Existence) Let S be a non-empty set. Then there ezists a free group F generated by S .
Proof. Consider the Cartesian product
T = S x {-l,l}. For any a E S , denote a' = ( a , l ) and
= (a,-1).
Choose the set T as an alphabet and let E be the set of all finite non-empty words. Let F contain the empty word e and all reduced words of E . We define in F an operation as follows. Let u, w E F. If u = e , let uw = w. Similarly, if w = e , let uw = u. In all other cases, u and w are reduced words of E . Then uw E E . By cancelling from uw all pairs of the form a'u-' and a-la' we get eit.her e or a uniquely defined w E F . Define in the first case uv = e and in the second case uw = w. It follows that F is a group with e as the neutral element. Let us identify a' with a. To show that F is generated freely by S, let G be an arbitrary group and g : S -+ G a mapping. Define h : F --* G as follows: Let h ( e ) be the neutral element of G. If w # e , then w E E and w has a unique reduced representation
w = apL7 where
E;
.. .a:
= f l , ai E S, i = 1 , . . .,n. Then we set
It follows that h : F
-+
G is a homomorphism and hlS = g .
A.5. REPRESENTATION OF GROUPS
22 1
Theorem A.5.4 Every group is isomorphic to a quotient group of a free !PUP*
Proof. For a group G, choose a set S of generators of G. Let F be the free group generated by S. Then the inclusion map g : S 4 G has a homomorphic extension h : F --t G . Since S = g(S) C h( F)and S generates G, we have h ( F ) = G. Let IC = ker h be the kernel of h. then G and F / K are isomorphic. In the proof of Theorem A.5.4, K is a normal subgroup of the free group F. Let R be a set of generators of K. (By the Nielsen-Schreier Theorem, we may suppose that R generates IC freely.) The set S determines F and the set R determines K. Hence the group
G 1: FJIC is determined by the sets S and R. The elements of S are called generators of G and the elements of R are called defining relations of G. Let w E R. If Ii # {e}, we m a y suppose that w # e. Then w is a reduced word
w = ab1aE2 . . .a? 1 2
where a; E S and E ; = f l , i = 1,...,n. Since w E K , w represents the neutral element e of G. This is denoted by the equation
. ..
aE1aE2
1
2
n =e
aEn
which is a traditional form of a defining relation. .ZX Example. Let 9 : z H e ' y z . Then the mappings go = id, g' = g, g2 = g o g, g3 = g o 9 o 9, . . ., gn-’ are distinct but g" = go, gn+l = g1 and so on. Let S = { g } and let G be the rotation group generated by S. Then G contains n distinct elements. On the other hand, the free group F generated by S contains the elements
which are all distinct. In this case, I i is generated by the element g". Hence G is defined by one generator g and one defining relation gn = id. o We have shown that the group G3 of rotations z H ei8z has no canonical faithful representation in SL(2, C). More generally, let us consider a group G whose elements are transformations g : C +. C,
222 APPENDIX A . HYPERBOLIC METRIC A N D MOBIUS GROUPS Then
g ( z ) = w e w = g-'(z) =
If h ( z ) =
dw- b -cw t a'
q,a6 - P7 = 1, is another element of G, then V+
( a a t b 7 ) t t a@t b6 g(h(zz))= ( c a d7)a t c p d6
+
(z
+
(," f ) E f; and g o h by ( fi)( SL(2, C), then g-' is represented by ( f ). The only problem is that both f; ) and ( -' ) represent the same -d (
If g is represented by the matrix
f;)
~SL(2,C)andhby )-l
--a
-C
mapping g E G and there is no way to define a canonical homomorphism G + SL(2, C). Let G be generated by S = { g l , 92,. . .}. If G and the free group F generated by S are canonically isomorphic, then S generates G freely. Choose a representation
for every gj E S and set
Since y : S + SL(2,C) has a homomorphic extension cp : G SL(2,C), G has a representation in SL(2,C). It follows that this representation is faithful. Hence we have the following theorem.
Theorem A.5.5 If G is a free group of transformations of the form (A.8), then G has a (canonical) faithful representation in SL(2, C ) . Let G be a group of transformations (A.8). Let G be generated by S and let R be the set of defining relations. Fix a representation
for every g E S. Let cp : S -, SL(2, C) be the canonical map, i.e.,
Let
A.6. COMPLEX MOBlUS TRANSFORMATlONS
223
be a defining relation. Then
(
)
If v(r) = for all T E R , then cp can be extended to an injective homomorphism p : G + SL(2, C), i.e., G has a faithful representation in SL(2, C).
A.6
Complex Mobius transformations
For geometrical reasons, a mapping g : C the form
-, C
which can be represented in
( i ) EGL(~,C),
g(z) =
(-4.9)
is called a (complex) M66ius transformation. Note that g ( - d / c ) = 00 and g ( o 0 ) = a / c . It follows that g is a homeomorphism. The group of Mobius transformations is denoted by M = M ( C ) . Theorem A.6.1 If 21, 2 2 , z3 E C are distinct points and w l , w2, w3 E C are distinct points, then there exists a unique g E M for which g(zj) = wj, j = 1,2,3.
Define a mapping
CP : GL(2, C) -,M as follows: If A =
(
) E GL(2,C), then @ ( A )= gA where gA(z) =
az
+6
cz t d'
Since gA 0 gB = gAB, @ is a homomorphism and
A E ker CP By choosing z = 0,
00,
az+b -z cz
+d
for all z E C.
1 we obtain 6 = 0, c = 0 , a / d = 1. Hence
If I( = ker @, then M ( C ) 21 GL(2, C)/IC.
224 APPENDIX A . HYPERBOLIC METRIC A N D MOBIUS Denote
@O
GROUPS
= @ISL(2,C) and 0 ’ 1
= ker a0 = K n SL(2, C) = { - I , I } .
Then every g E M is the projection of exactly two matrices A , - A E SL(2, C). Moreover,
M If A =
(
2(
SL(2, C)/Ir'O = PSL(2, C).
f; ) E GL(2,C) and X # 0, then tr2A - - tr2(XA) det(XA)' det A
i.e., the function A H (tr2A)/detA is invariant under the mappings A w XA. Similarly, also the function llA112/1 det A1 is invariant. Hence we have in M well-defined functions
Denote ltrgl = )tr2g(1/22 0. Let G c M be a group. The stabilator
of z E C is a subgroup of G. The G-orbit G ( 4 = {g(z) I 9 E G I of z E C is a subset of C. Two points z1, 2 2 E C are equivalent under G if g(z1) = z2 for some g E G. Two subgroups G1 and G2 of M are conjugate if hG1h-l = G2 for some h E M .
Theorem A.6.2 The following conditions are equivalent: 0
z1 and z2 are equivalent under G,
0
G,, and G,, are conjugate.
A . 6. COMPLEX MOBIUS TRANSFORMATIONS
225
Let G and GI be isomorphic subgroups of M , and let j : G + GI be an isomorphism. If there exists a homeomorphism cp : C + C such that
j ( s ) = cp 0 9 0 cp-I for all g E G, then j is geometric. Note that also j-’ : GI --+ G is geometric. If cp E M , then j is a conjugation and the transformations g and j ( g ) = cp o g o 9-l are conjugate. If two groups are geometrically isomorphic, they share many geometrical properties. For instance, if z is a fixed point of g E G, then cp(z) is a fixed point of j ( g ) . Example. Let G be generated by g : z H z 1 and GI by g 1 : z H 32. Since G and GI are cyclic free Abelian groups, the mapping j : g H g' has an isomorphic extension j : G 4 GI. This isomorphism cannot be geometric since g has only one fixed point but g' has two fixed points in C.
+
Let Fg be the set of the fixed points of g E M . Then evidently Fg = Fg-l.
Theorem A.6.3 Let g , h E M . I f g and h commute, i.e., if g h-' = id, then g(Fh) = Fh and h ( F g )= Fg.
o
h o g-' o
Proof. If z E Fh, then h ( g ( z ) ) = g ( h ( z ) ) = g ( z ) . Thus g(Fh) C Fh. Similarly, since h - l ( g - * ( z ) )= ( g o it)-'(.) = ( h o g ) - ' ( z ) = g - l ( h - ' ( z ) ) = g - l ( z ) , we have g-l(Fh) C Fh. Hence Fh = g(Fh). Examples. 1. Let g ( z ) = 1/z and h ( z ) = kz, k
Fh = (0, m} and
> 1. Then
Fg = {-1,l).
We have g(Fh) = Fh but h ( F g )# Fg. On the other hand, g o h = h-' o g # h o g . In fact, h o g = g o h if and only if g(Fh) = Fh and h(Fg)= Fg (cf. Theorem A.7.3). 2 . Let g ( z ) = l / z and h ( z ) = -z. Then
Fh = (0, oo} and
Fg = {-1,1}.
We have g(Fh) = Fh and h ( F g ) = Fg. On the other hand, g o h = h o g . Note that Fh r l Fg = 8. Let g E M ,
Then z E Fg if and only if cz2 - ( a - d ) z - b = 0. We have three alternatives:
Fg = C and g = id, i.e., a - d = c = b = 0,
226 A P P E N DIX A . HYPERBOLIC METRIC AND MOBIUS GROUPS (u t
d)2 - 4 = 0,
0
Fg contains one point only, i.e.,
0
Fg contains two points, i.e., ( u t d)2 - 4
# 0.
Example. Let g(z) = k z , k > 1, and h ( z ) = --I. Then Fg = Fh = (0,oo). However, the mapping properties of g and h are quite different. E.g. h2 = id but g2 # id. Hence we have to improve the above classification of Mobius transformations. o
Define mk E M by setting
mk(z) = k z for k E C, k m l ( z ) = z + 1. Theorem A.6.4 tr2mk = k
# 0 , 1,
+ k-' + 2.
Proof. If generally g = @(A), A E GL(2, C),then trg=1, then A =
(
) and
If k = 1, then A =
(
) and
If k
#
tr2ml =
(1
tr2A det A '
+ q2= 4 . 0 1
Theorem A.6.5 If A, B E SL(2,C), then t r A = tr(BAI3-l).
) and I? = (
Proof. Let A = ( f
a P
BAB-'
= ( y
s)(:
:)(
-,
). Then
-n")
A.6. COMPLEX MOBIUS TRANSFORMATIONS
227
and hence
Let g, h E M and choose A, B E SL(2,C) such that @(A) = g and @ ( B )= h. Then @ ( B A B - ' ) = h o g o h-l. Hence we have the following corollary for Theorem A.6.5. Corollary A.6.6 tr2g = tr2(h o g o h-') for all g , h E M .
Theorem A.6.7 Let g be a Mobius transformation with two fixed points x and y. Choose h E M such that h(z) = 00 and h(y) = 0. Then h o g o h-' = mk where the number k # 1 does not depend on the choice of h. Proof. We have Fhogoh-l= (0, w} = F,, for all k # 1. Let k = h(g(h-'(1))). Then k # 1 and mk(1) = k. Hence mi' o ( h o g o h-') has 1, 0 and 00 as fixed points. By Theorem A.6.1, mk = h o g o h-'. If mko = ho o g o h;', f r o ( z ) = 00 and ho(y) = 0, then mk = (h o h i ' ) o mk, o ( h o hi')-'. Since Fhoh;’ = (0, oo}, we have h o hi' = mkt, k’ # 1. Then mko = mkt o mk o (tnkt)-l = mk.
Theorem A.6.8 Let g be a Mobius transformation having one fixed point z only. Let y # 2 and choose h E M such that h ( z ) = w, h(y) = 0 and h ( g ( y ) )= 1. Then h o g o h-' = ml. Proof. Since g and h o g o h-' are conjugate, also h o g o h-' has one fixed point only, i.e., Fhogo,L-l = {w}. Hence h o g o h-' : z H z b. Since
+
1 = h(g(y)) = h(g(h-'(0))) = b,
wehavehogoh-'=ml.o By Theorems A.6.7 and A.6.8, every Mobius transformation is conjugate to a standard transformation mk. Moreover, all transformations with exactly one fixed point are conjugate to m l : z H z 1. Suppose that a Mobius transformation g with two fixed points is conjugate to standard transformations mp and mg.Then also mp and mp are conjugate, and the next theorem shows that either mp = m, or mp = my'.
+
Theorem A.6.9 Standard transformations mp and m, are conjugate if and only i f p = q or p = q-'.
228 APPENDIX A . HYPERBOLIC METRIC A N D MOBIUS GROUPS
Proof. Suppose that mp and m, are conjugate. Then by Corollary A.6.6, tr2mk = tr2mq, and we have by Theorem A.6.4 p+p-'
= q+q-',
i.e., either p = q or p = q-'. Suppose conversely that either p = q or p = q-'. mp = m,. If p = q-' # q, let h(z) = 2-l. Then = (pa-')-'
h(m,(h-'(z)))
In the first case,
= p-'a = mq(z)
and mp and m, are conjugate.
Theorem A.6.10 Let 91, and only if tr2gl = tr2g2.
92 E
M
\ {id}.
Then g1 and g2 are conjugate if
Proof. If g1 and 92 are conjugate, then tr2gl = tr2g2 by Corollary A.6.6. Suppose that tr2gl = tr2g2. Let g1 be conjugate to standard transformation mp and g2 to standard transformation m,. Then, by Corollary A.6.6, t r2 mp = tr 2 g1 = tr 2 9 2 = tr2mq.
+
Hence, by Theorem A.G.4, p + p-' = q q-l, i.e., either p = q or p = q-'. By Theorem A.6.9, mp and mq are conjugate and hence also g1 and g2 are conjugate. o
Theorem A.6.11 Suppose that g E M has two finite fixed points x and y. Tit e n (A.lO) and g and standard transformation mk are conjugate. Proof. Let h(z) = 2.Then h E M , h(s) = rnk = h o g o h-l. Since h o g = mk o h, we have
00
and h(y) = 0. Denote
g(4 -Y - k-2 - Y g(2)-x k-x from which the assertion follows. If x = 00, then we obtain from (A.lO) by letting z -+
00
A.6. COMPLEX MOBIUS TRANSFORMATIONS Similarly g(z) =
z
229
+ z (1 - ;)
if y = 00. A standard transformation mp,p > 1, maps the circle 1.1 = T onto the circle IzI = p r . On the other hand, if 141 = 1 and q # 1, then m, maps every circle 1.1 = T onto itself. This basic distinction gives rise to the following classification of the Mobius transformations.
Definition A.6.1 Let g E M 0
0
0
\ {id}.
Then
g is parabolic i j g has only one fixed point in C l i.e., g is conjugate to m1, g is loxodromic i f g has two fixed points in C and g is conjugate to mki lkl # 1, g is elliptic i j g has two fixed points in C and g is conjugate to mk,
lkl = 1. By Theorem A.6.9, the type of g given in Definition A.6.1 does not depend on the choice of mk. Moreover, conjugate transformations are always of the same type. If lkl > 1 and z # 0, 00, then
m w
+
{
0 00
asn---oo, asn-oo.
Definition A.6.2 Let g be loxodromic and z $ Fg. Then a ( g ) = lim gn(z) n+oo
is the attractive fixed point of g and r ( g ) = lim g-"(z) n4oo
is the repulsive fixed point of g .
A domain D C C is a disk if it is bounded by a circle. A half-plane is a disk whose boundary circle passes through 00. It can be shown by elementary calculation that disks are mapped onto disks by Mobius transformations. Let g € M . We are interested in finding a disk D such that g ( D ) = D. Suppose that g = mk, k # llcl > 1. Then g ( D ) # D for any disk D c C. On the other hand, if g = mk with k > 1, then g ( D ) = D if and only if D is a half-plane bounded by a straight line through the origin.
230 APPENDIX A . HYPERBOLIC METRIC A N D M ~ B I U SGROUPS
Definition A.6.3 Let g E M be loxodromic. If g(D) = D for some disk D c C , then g is hyperbolic. Otherwise g is strictly loxodromic. By definition, mk is parabolic if and only if k = 1, i.e., tr2mk = 4. Similarly, mk is elliptic if and only if k = ei9, 29 E R. Then tr2mk = ei9 e-j9 = 2 2 cos 29. Hence mk is elliptic if and only if 0 5 tr2mk < 4. If mk is loxodromic, then mk is hyperbolic if and only if k > 0, k # 1, i.e., tr2mk > 4. The following theorem can now be proved by elementary geometrical reasoning.
+
+
Theorem A.6.12 Let g E M \ {id}. Then 0
g is parabolic if and only i j tr2g = 4,
a
g is elliptic if and only if 0 5 tr2g < 4,
0
g is hyperbolic if and only if tr2g > 4,
0
g is strictly loxodromic if and only if tr2g # Itr2gl.
The cross-ratio (z1,z2,z3,z4) of distinct points zj E C , i = 1 , 2 , 3 , 4 , is defined as the image of z1 under the Mobius transformation for which z2 H 1, z3 H 0 and z4 H 00. If all points are finite, then
If g E M , then by Theorem A.6.1
( a ,z2, z3, z4) = (g(z1), g(z2), &3), g(z4)). Let g E M have two fixed points. Then it follows similarly as in the proof of Theorem A.6.11 that the cross-ratio (!7(4,*,
2,Y
)= k
does not depend on the choice of the point z E C \ {x,y } . Moreover, g and mk are conjugate. Suppose that g is loxodromic. Choose x = a ( g ) and y = r(g). Denote k(g) =
z, 2 , Y).
We have 1k(g)1 > 1 by Definition A.6.2. Let g be elliptic. By Theorem A.6.9, we may choose x and y such that k(g) = ( g ( z ) , z , x , y ) = ei9,
o < 6 5 T.
The number k(g) is called the ntultiplier of a loxodromic or elliptic transformation g. For a parabolic g, we set k(g) = 1.
A . 7. ABELIAN GROUPS OF MOBIUS TRANSFORMATIONS Theorem A.6.13 Let g E M
\ {id).
23 1
Then
0
g is hyperbolic i f and only if k ( g ) > 1 ,
0
g is strictly loxodromic i f and only i f k(g)
#
Ik(g)l > 1.
P m f . Theorems A.6.4 and A.6.12. o
A.7
Abelian groups of Mobius transformations
Consider Mobius transformations g and h and matrices A, B E SL(2,C) representing them, i.e., g = @ ( A )and h = @ ( B ) . Since also -A and -B represent g and h, respectively, the trace of a Mobius transformation is determined only up to the sign. Therefore, the square of the trace is a well-defined function in M . However, we have the following result.
Theorem A.7.1 The trace tr(g o h o g-' o h-') = tr(ABA-'B-') is uniquely determined.
Proof. The matrix product ABA-l B-' does not change if A is replaced by - A or B is replaced by -B. By the proof of Theorem A.7.1, we inay speak about the matrix of the commutator g o IL o y-’ o h-' in SL(2, C).
Theorem A.7.2 (i) M6bius transformations g and h have a common fixed point i f and only i f tr(g o h o g-' o ti-’) = 2. (ii) I f g # id and h # id share a fixed point, then either (a) g o h = h o g and
Fg = Fh, or
(b) g o h o g-' o h-' is parabolic and Fg #
Fh.
Proof. In (i), we inay suppose that g(m) = w. Let g
=
(i i),
ad=l,
and
232 APPENDIX A . HYPERBOLIC METRIC AND MOBIUS GROUPS Then, by a lengthy computation,
t = tr(g o h o 9-l
o
h-') = 2
+ b2r2+ 6(u - d ) r ( a - 6) - ( u - d)2r/3
Suppose that g and h share a fixed point. We may suppose that 00 E FgnFh. Then 7 = 0 and t = 2. Conversely, suppose that t = 2. If g is a parabolic, then g ( z ) = z b and u - d = 0 . Hence t = 2 b2r2= 2 and it follows that 7 = 0 and 00 E Fg fl Fh. If g is not parabolic, then we may suppose that Fg = {O,oo}, i.e., 6 = 0 and ad = 1, a # d. Then
+
+
t = 2 - (a- d)2rp= 2 and we have 7P = 0. Hence Fg f l Fh # 0. In (ii), we may suppose 00 E FgnFh. Then by (i), either gohog-'oh-' = id or g o h o g-' o h-' is parabolic. Moreover, g o h o g-' o h-' fixes 00. Hence g o h 09-' o h-' = id if and only if g(h(g-'(h-'(0)))) = 0. Since
+ +
we have g(h(g-'(h-'(O)))) = (-dp - ba up 66)/d6. Hence g o h o g-' o = id if and only if P ( a - d ) = b ( a - 6). Suppose that a - d = 0. Since ad = 1, we may suppose that u = d = 1. From g # id it then follows that 6 # 0. Hence P(u - d ) = 6(a - 6) if and only if a = 6 = f l and p # 0, i.e., Fg = Fh = (00). Suppose that a - d # 0. Then g has two fixed points. We may suppose that Fg = (0, 00). Since b = 0, we have p(u - d ) = 6(a - 6) if and only if p = 0, i.e., Fg = Fh = {0,00}.
It-'
If g , h E M \ (id} commute, then g(Fh) = Fh and h(Fg) = F' by Theorem A.6.3. Also the converse holds:
Theorem A.7.3 Let g , h E M g(Fh) = Fh and h(Fg)= Fg.
\ {id}. Then g
oh
= h o g if and only if
Proof. Suppose that g(Fh) = Fh and h ( F g )= Fg. It suffices to show that goh=hog. We have either Fg = Fh or Fg n Fh = 8. Indeed, if we had y
E Fg n Fh and
z
E F'
\ Fh
(or z E Fh
\ Fg),
then the condition h ( F g ) = Fg would imply that Fg would contain three distinct points 2, y and h ( z ) which is impossible.
A.7. ABELIAN GROUPS OF MOBIUS TRANSFORMATIONS
233
Suppose that g is parabolic. We may suppose that Fg = (m} and g ( t ) = = F,, we have 00 E Fg f l Fh and hence Fg = F h = (w}. Since h ( z ) = z + + f o r s o m e p # O , w e h a v e g o h = h o g . Suppose that g has two fixed points. We may suppose that Fg = (0, m}. Then g(z) = kz, k # 1 . If Fh = F,, then h ( z ) = k’z for some k’ # 1 and we have g o h = h o g . It remains the case Fg n Fh = 8. Let h ( z ) = ad - bc = 1. Since h(F,) = F,, we have h ( 0 ) = 00 and h(w) = 0, i.e., a = d = 0 . Hence h(z) = a / z , a = b / c # 0. Then Fh = {&,-&}. Since g ( F h ) = F h , g(t) = k z , we have k = -1. Hence z
+ 1. Since h(F,)
s,
g(z) = - z
and
a h(z)= z
and we have g o h = h o g. o If g o h = h o g and Fg n Fh = 0, then by the above proof, g2 =
h2 = ( g o 1 ~ =) ( h~ o g ) 2 = id,
i.e., all these mappings are elliptic and of order two. Note that g is of order two if and only if tr2g = 0. The transformations id, g(z) = - z , h ( z ) = a / z and g ( h ( z ) )= - a / z constitute an Abelian group G C M . Conjugating G by the transformation z H z/&, we obtain the quadratic group which contains the transformations id, z H - z , z H 1/z and z H -l/z. Theorem A.7.4 Suppose that G C M is an Abelian group. Then either Fg = Fh for all g , h E G \ {id} or G is conjugate to the quadratic group. Proof. Suppose that there exists g, h E G \ {id} such that Fg # F h . By the proof of Theorem A.G.4, Fg n FIL = 8 and g and h have both two fixed points. Moreover, if we normalize such that Fg = (0, oo}, then
g(z)= -z
and
a h ( z ) = -, z
a
# 0.
Suppose that h' E G \ (g,id}. Then, by the above reasoning, h'(z) = a ' / z , a’ # 0. Since h ' o h = 110 h', we have (a')2= a2,i.e., a' = fa. Hence either h' = h or h' = g o 11. u If G C M is a group such that Fg = Fh for all g, h E G \ {id}, then G is Abelian by Theorem A.7.3. Suppose that G C M is a group consisting of the identity and three elliptic transformations 91, 92 and g3 of order two. If Fgi = Fgj, then
234 APPENDIX A . HYPERBOLIC METRIC AND MZiBIUS GROUPS g; = g j . Hence by Theorem A.7.2, Fgi n Fgj = 8 for all i # j . Moreover, g; o g j = gk and g j o g; = gk, ( i , j , k} = {1,2,3}. Hence G is conjugate to
the quadratic group. A group G C M is purely elliptic if it contains besides the identity elliptic elements only. For example, the quadratic group is purely elliptic. We show next that all purely elliptic groups can be interpreted as groups of spherical rotations. Consider the qz2~3-space and choose the qzz-plane as the complex plane C. Let S be the sphere of radius 1/2 centered at ( O , O , 1/2). Stereographic projection p with (O,O, 1)as the projection center maps S bijectively onto C if (O,O, 1) and 00 are let to correspond to each other. Hence S and C can be identified and S = C is called the Riemann sphere. The stereographic projection p maps the Riemann sphere conformally onto extended complex plane. Let K be a rotation of the Riemann sphere. Then g =p o
K op-'
maps the extended complex plane bijectively and conformally onto itself. By a well-known result in complex analysis, g is a Mobius transformation. By geometry, g has two fixed points. Since a spherical rotation has no attracting fixed points, g is elliptic. Let x and y be two points in C. Denote by s, and sy the points of the Itiemann sphere S for which p (s,) = z and p(sy) = y . It can be shown by geometrical reasoning that s, and sy are antipodal points of S if and only if y = -1/2. These slightly heuristical considerations justify the following definition:
Definition A.7.1 A transformution g E M is a spherical rotation if either g = id or g is elliptic and the fized points x and y of g satisfy y = -113. The standard transforinations mk, k = e'w, are spherical rotations; these transformations are represented by matrices of the form
(A.ll) The quadratic group contains besides the identity three distinct spherical rotations whose rotation axes are perpendicular to each other.
Theorem A.7.5 A transformation g E M is a spherical rotation if and only if 9 is of the form
A.7. ABELIAN G R O U P S OF MOBIUS TRANSFORMATIONS
235
Proof. Let g E M \ {id} be a spherical rotation. Then g is elliptic. If one of the fixed points x and y is 00, then the other is 0, and the assertion follows by (A.11). Suppose that x and y are finite. Then by (A.lO)
Since y = -l/?E, we obtain
kxz+ 1
a=
(XT
xu+ k
d=
+ l)&'
+
(55 1)&'
On the other hand, we have [LIZ = 1. Hence K = 1/k and
a=
x1 x -x
+1
- xT+ k ( x T + l)& - ( x F +
= d.
Similarly,
x(k - 1)
6=
(2:
c=
+ l)&'
U(k - 1)
( x z + 1)&'
and
Conversely, suppose that g =
( -6'- ) , Ti
laI2
+ \6l2 = 1.
+
Then tr2g = ( a E)2 = 4(Rea)' 5 4. If R e a = f l , then a = f l and b = 0 and g = id. Otherwise tr2g < 4 and g is elliptic. Suppose that g # id. If 6 = 0, g is a spherical rotation by (A.11). Hence we may suppose that 6 # 0. The fixed points x and y of g are obtained by solving the equation $z2 - (7i - a ) z b = 0. Hence
+
x =
E
-
U-a-J-
u
+
+
26
Y =
26 The numerator of y is purely imaginary. Hence
- -(EY=
u)
+d 26
m
236 APPENDIX A . HYPERBOLZC METRIC A N D MOBIUS GROUPS and we have
xy =
(a i-
- 4 - (a - a)2 1aI2- 1 -lbI2 -----
PI2
4b5
PI2
- -1.0
Geoinetricdy it is evident that spherical rotations constitute a group. This fact is not so evident if we consider Definition A.7.1 only but it follows immediately from Theorem A.7.5. Denote by K: the group of spherical rotations.
Theorem A.7.6 If G is a purely elliptic subgroup of M , then hGh-' c for some h E M .
K
Proof. We use matrix notation for Mobius transformations. Hence matrices will denote elements of PSL(2, C), i.e., they are determined up t o the factor
&I. After a suitable conjugation G contains a spherical rotation
whose fixed points are 0 and Let V E G \ {id},
00.
If Fv = { O , o o } , then V E K:. If FU n Fv contains exactly one point, then UVU-'V-' is parabolic by Theorem A.7.2. Hence we may suppose that V(0) # 0 and v(00) # 00. Then UV # id. Since V and UV are elliptic, the traces t r V = a d and t r (UV) = &a+-id are real. Then d = ii + r where T =a d - ( a 7i) is real. From &ai-Sd = &a Z i i + Zr it follows also ET is real. Since F # f l , we have r = 0 and d = ii. Hence
+
+ +
+
V=("
' ) , aii-bc=1.
C T i
The commutator C = UVU-'V-' Hence (cf. the proof of Theorem A.7.2) -2
(A.12)
is either the identity or elliptic.
5 tr C = 2 - bc(&- Z)2 5 2.
Since ( E < 0, we have bc 5 0. On the other hand, it follows from the conditions V(0) # 0 and v(00)# 00 that bc # 0. Thus bc < 0.
A.7. ABELIAN GROUPS OF MOBIUS TRANSFORMATIONS
237
By Theorem A.7.5, V E Ic if and only if c = -5. We may conjugate by any transformation A E M of the form
A=(’0
’-1
),
p>O,
since AUA-’ = U by Theorem A.7.3. Now
@.
if and only if p 2 = Since bc < 0, we have -c/& > 0. Hence p > 0 is well-defined. We still have to show that p does not depend on the transformation V E G , V ( 0 )# 0 . Suppose that G contains the transformations
and
Let V2 E G such that Vz(0) # 0. Then by (A.12)
Corollary A.7.7 If G C M is a finite group then hGh-l c
K
for some
hEM. Proof. A finite group G C M is purely elliptic since the powers gn, n = 0,5 1 , f2,. . .are all distinct transformations whenever g # id is non-elliptic. 0
238 APPENDIX A . HYPERBOLIC METRIC AND MOBIUS
A.8
GROUPS
Discrete groups of Mobius transformations
+
+
+
SL(2,C) is a topological group with the norm IlAll = lbI2 lcI2 ld12)'/2, A = ad - bc = 1. A subgroup I' c SL(2, C) is discrete, if all subsets of r are open in I', i.e., if for every A E I' there exists E > 0 such that r n { B E s ~ ( 2 , c I) I I A- B I <~ E } = { A } .
(
),
By Corollary A.4.2, r is discrete if and only if {I}is open in r. Hence r is discrete if and only if the conditions A , + I , A , E r, imply that A, = I for all sufficiently large values of n . N = { I , - I } is a normal subgroup of SL(2,C). The quotient group PSL(2, C) = SL(2, C ) / N and the group M of Mobius transformations are canonically isomorphic. If PSL(2, C) is equipped with the topology coinduced by the projection P : SL(2, C) + PSL(2, C ) , then PSL(2, C) becomes a topological group. A subgroup G C PSL(2,C) is discrete if and only if { P ( I ) } is open in G. If G C M N PSL(2,C) is discrete and h E M ,then hGh-’ is discrete. The norm llsll = (b12 PI2 + lc12 -I- I42 )112
+
s,
of a Mobius transformation g ( z ) = ad - bc = 1, is well-defined Combining Theorem A.4.6 and Corollary A.4.4 we obtain
Theorem A.8.1 A group G C M is discrete if and only if the set { g E G 11g11 < t } is finite for ull t > 0. D Let G be a cyclic group. We may suppose that G is generated by a standard transformation mk. Since
Ilrnill = (lkl" t lkl-n)’/2
if k
#
1
and
Ilm7ll = (2 + n 2 11 / 2
9
it follows from Theorem A.8.1 that G is discrete if g is parabolic or loxodromic. If r n k is elliptic, i.e., k # lkl = 1, G is discrete if and only if g is of finite order. There exist also non-cyclic Abelian discrete groups G c M :
G is generated by translations z
t+
z +ol and z
++
z+w2, Im
2 # 0,
G is conjugate to the quadratic group, G is generated by an elliptic h f M of finite order and a loxodromic g E M such that Fg = Fh.
A.8. DISCRETE GROUPS OF MOBIUS TRANSFORMATIONS
239
Theorem A.8.2 Let g , h E M . If g is loxodromic and Fg f l Fh contains exactly one point, then the group G generated by g and h is not discrete.
Proof. We may suppose that F'flFh = (m}. Replacing g by g-' if necessary we have
Then g - n ( h ( g n ( z ) ) ) = az
+ a-"b and
1.(
Since 11g-" o h o g'*)l Theorem A.8.1.
+-
the group G is not discrete by
Theorem A.8.3 Let G C A4 be a group. If there exists un infinite sequence ( g n ) C G such thut gn(w) + w
for w = 1, 0, 00,
then G is not discrete.
Proof. Let the representations
be chosen such that Red,, 2 0. Since
we have
240 APPENDIX A . HYPERBOLIC METRIC A N D MdBIUS GROUPS
Since Re d , 2 0, also dn
-+
1. Then
and it follows that a, -+ 1. On the other hand,
and
bn = dngn(0)
+ 0.
Since the sequence ( g , ) contains infinitely many distinct elements, the group
G is not discrete by Theorem A.8.1. Let G c M be a group. A disk D is G-invariant if g(D) = D for all g E G . If D is G-invariant, the group G is said to act in D. Denote by U the upper half-plane { z I Ini z > 0). Lemma A.8.4 Let g(4 =
at
+b
5
7
ad - bc = 1 .
Then g ( U ) = U if and only if a , b, c and d are real.
Proof.If a , b, c , d are real, g maps the extended real axis onto itself. Then g ( U ) is either U or the lower half-plane. Since Img(i) = 1 / ( c 2 d 2 ) , we have g(U) = U . Conversely suppose that g ( U ) = U . Denote
+
1 -c~-d g ( t ) - az b *
h ( z ) = --
+
Then h ( U ) = U and ( - c ) b - ( - d ) a = a d - bc = 1 . If c = 0, then a # 0. Hence, replacing g by la if necessary, we may suppose that c # 0. Since g ( U ) = U , g is not strictly loxodromic. Then a d is real by Theorem A.6.12. Since g ( m ) = a / c and g-'(oo) = - d / c are red, also ( a + d ) / c is real. Hence c , a and d are real. Finally, it follows from ad-bc = 1 that b is real.
+
Theorem A.8.5 If a non-Abelian purely hyperbolic group G acts in then G is discrete.
U,
A.8. DISCRETE GROUPS OF MOBIUS TRANSFORMATIONS
241
Proof. We consider G as a subgroup of PSL(2, C)and use matrix notation ad - bc = 1, then a, for the transformations of G. If A E G, A = b, c, and d are real by Lemma A.8.4. We may normalize by conjugation such that G contains a transformation A with 0 and 00 as fixed points. Then
( 1),
by Theorem A.6.11. Suppose that G is not discrete. Then by Corollary A.4.4 we can find a sequence Vn E G of distinct elements such that V, -+ I . We show that there exists an integer no such that
for all n
D,
> no. To that
end, let
= AC,A-'C,'
with Vn -
(zi
f;",
), a,,&
- b,,c, = 1. Then (cf. Theorem A.7.2)
Since SL(2, C)is a topological group and V, -, I , we have Cn + I . Hence trC, --t 2 and b,cn 4 0. Then andn = 1 b,cn -+ 1 and and, > 0 for all sufficiently large values of R. Since G is purely hyperbolic, we have tr2C, 2 4 and tr2D, 2 4. Since b,c,(A - X-')2 + 0, there exists an nb such that
+
bncn 5 0 for n > nb.
Similarly anbnc,d, 2 0 for sufficiently large values of n. Since andn large values of n, we can find an ng such that
b , ~ , 2 0 for n > n;. Hence
> 0 for
242 APPENDIX A. HYPERBOLIC METRIC A N D MOBIUS GROUPS Moreover, trCn = 2 for n > no. Since G contains no parabolic elements, we have Cn = I for n > no. Since G contains no elliptic elements, we have by Theorem A.7.3, FA = Fv,, and bn = cn = 0 for n > no. Since G is non-Abelian, G contains an element B for which FB nFA = 8 (Theorem A.7.4). Hence
.=(7
a
6),
Crs-p7=1,
Ia+SI>2,
pzo,
7#0.
then X, + I. Then it follows similarly as above that
for sufficiently large values of n. Since p i # 1 # p i 2 , we have ap = 76 = 0. Suppose that a = 0. From a6 - ,By = 1 it follows that y # 0. Hence 6 = 0 which contradicts the condition la Sl > 2. If a # 0, then p = 0 which is also impossible. Hence there exists no sequence V, -+ I and G is discrete.
+
Theorem A.8.5 can be complemented as follows:
Theorem A.8.6 If a group G C M is purely hyperbolic, there exists a G-invariant disk D . E G\{id}. By Theorem A.7.2, either Fg = Fh or FgrlFh = 8. If Fg = Fh for all g and h, any disk D whose boundary contains Fg is G-invari ant. Suppose that there exist g, h E G \ {id} such that Fg n Fh = 8. We may suppose that Fg = {O,oo}. Let f E G and
Proof.Let g, h
Since f and g o f are hyperbolic, the traces
and t2
= tr(g o f ) = a u + S/u
A.8. DISCRETE GROUPS OF MOBlUS TRANSFORMATIONS
243
are real by Theorem A.6.12. Then it follows that a and 6 are real. Let
Then a and d are real and ( a of h:
x = Y
Since x
#
00
=
+ d)2 > 4.
Consider the fixed points x and y
a-dtda
-
d
2c 2c
d
w
# y , we have c # 0, and
is real. It follows that the fixed points of g and h lie on the same line through the origin. If we conjugate by a rotation z H ei'z, the matrix of g is not changed but the fixed points x and y of h can be mapped e.g. on the r e d ' axis. Hence we may suppose that g and h map U onto itself. Then by Lemma A.8.4, a , b, c and d are real. a6 - /37 = 1, then (I! and S are real and I f f E G, f = ,* f
(
),
+
+
Since f o h E G, also a a pc and yb Sd are real. Since bc # 0, it follows that also p and 7 are real. then f ( U ) = U by Lemma A.8.4. o Combining Theorems A.8.5 and A.8.6 we obtain a quite useful result on purely hyperbolic groups.
Theorem A.8.7 A non-Abeliarz purely hyperbolic group is discrete.
This Page Intentionally Left Blank
Appendix B
Traces of matrices B.l Trace functions In order t o complete certain arguments of Section 4.12 we need to consider traces of matrices. Here we review the results of Heinz Helling (1391).
Definition B . l . l Let 0, satisfying
for any a,P E
r
be a group. A function t : l? + R,not identically
r, is called a trace function.
Let B : ’I + SL2(R) be an injective homomorphisms. A computation shows that t = trB is a trace function on I?. Here trB is the usual trace of a matrix. It is a straightforward verification to show that a trace function has the following properties:
1. Let
E
be the identity element of the group l?. Then t ( ~=) 2.
2. t(a-1) = t ( 0 ) .
3. t(@) = @a). 4. Permuting the arguinents of the function
q a , P, 7) = N a P 7 ) - t ( 4 t ( P 7 )- t(PP(7 Q)-t(r)t(@ + t ( Q ) t ( P ) t ( T ) its value gets multiplied by the sign of the permutation. 5. For a,@E l?, n E 2,t(a"p) is a polynomial in t ( a ) ,t(p), and t ( @ ) with rational coefficients. 245
APPENDIX B. TRACES OF MATRICES
246 6 . Let w be a word in
a1,.
..,a, E r and t a trace function.
Then t ( w )
is a polynomial of the values
7. Let a, P, 7, 6 E .’I The value of a trace function at aP76 satisfies
In particular, t(apr6)is a polynomial with rational coefficients of the values of the trace function t at products of at most three elements of { a , P , 7761. 8. Let a, ,8 E r. For a trace function t , let kt(a,,B)= a b c - a 2 - b 2 - c 2 + 4 where a = t ( a ) ,b = t(/3), c = t(ap). Let K(a,P;
u, v) = a"pa-U,B-u,u, 2) = f l ,
be a commutator of a and D. Then
Let F be a topological group. We use the notation Aut(F) for the group of continuous automorphisms of F.
Theorem B.l.l ([39,Proposition 11) Let I' be a group, t : I’ 4 R a trace function such that kt : r x r -+ R is not identically 0. We suppose, furthermore, that k t ( a , P )5 0 ijlt(a)l 5 2 . There ezists a representation 8 : r -+ SL2(R) such that t = tr8. If and 82 are both such representations, then there ezists an g E Aut(SL2(R)) such that 82 = g o 81.
Proof. Let a, /3 E r be elements for which k t ( a , @ ) # 0. Let A, B E SL2(R) be matrices for which t ( a )= t r A,
t ( p ) = t r B , t ( @ ) = trAB.
The condition k t ( a , P ) # 0 guarantees that a matrix by the numbers tr C, tr AC, tr BC, t r ABC.
C is uniquely defined
B.1. TRACE FUNCTIONS For every 7 E
247
r we form the equations
The condition k t ( a , p ) # 0 implies that the above system of equations has a unique solution B(y) E SLz(R). It is a straightforward verification to check that ’I 3 SLz(R), y H B(y), is a homomorphism.o Let t : I' -, R be a function. The topology induced by t on G is the weakest topology of G for which G is a topological group and t : G + R continuous.
Corollary B.1.2 Assume that r is not commutative, t is a trace function on r satisfying k t ( a , p ) 5 0 whenever It(a)l 5 2. If the topology induced by t on r is Hausdorff, then there exists a faithful representation 8 : r + SLz(R) with t = t r 8. If the induced topology is discrete and the virtual cohomological dimension of r is 2, then SLz(R>/B(I') is compact. One has to find a and ,8 E r such that k t ( a , p ) # 0. Assume that a and p do not commute. Since the topology induced by t on I' is Hausdorff, there exists an element y E r such that t ( a p a - ' P - ' y ) # t(7). If this holds already f o r 7 = E , then k t ( a , P ) = 2-t(apa-'p-l) # 0. Ift(apa-'P-') = 2, then a computation shows that kt(apa-'P-',7) # 0. Therefore we can apply the preceding theorem to find a representation 8 : G + SL2(R) such that t ( y ) = tr8(y) for all y E r. This homomorphism is injective because of the assumption concerning the topology induced by t on r. The last assertion about the compactness of SLz(R)/e(I') is an immediate application of the results in [83, Corollary to Proposition 181.
This Page Intentionally Left Blank
Bibliography The Real Analytic Theory of Teichmdler Space. [l] William Abikoff'. Number 820 in Lecture Notes in Mathematics. Springer-Verlag, Berlin-Heidelberg-New York, 1980. [2] Lars Ahlfors and Lipman Bers. Riernann's mapping theorem for variable metrics. Ann. Math., 72:385 - 404, 1960. [3] Lars Ahlfors and Leo Sario. Riernann Surfaces. Princeton University Press, Princeton, New Jersey, 1960. [4] Lars V. Ahlfors. On quasiconformal mappings. J . Analyse Math., 111~1- 58, 1954. [5] Lars V. Ahlfors. The complex analytic structure of the space of closed
Riemann surfaces. In Rolf Nevanlinna et. al., editor, Analytic Functions, pages 45 - 66. Princeton University Press, 1960.
[6] Lars V. Ahlfors. Lectures on quasiconformal mappings. The Wadsworth & Brooks / Cole Mathematics Series. Wadsworth & Brooks / Cole Advanced Books & Software, Monterey, California, 1987. Manuscr. prep. with the assist. of Clifford J. Earle jun. (Reprint). (71 Norman L. Alling. Real Elliptic Curves. Number 54 in Mathematics Studies, Notas de Matemstica. North-Holland, Amsterdam 0 New York 0 Oxford, 1981.
[8] Norman L. Alling and Newcoiiib Greenleaf. Foundations of the Theory of Klein Surfaces, volume 219 of Lecture Notes in Mathematics. Springer-Verlag, Berlin-Heidelberg-New York, 1971. [9] Aldo Andreotti and Per Holm. Quasianalytic and parametric spaces. In Per Holm, editor, Real and complex singularities, Oslo 1976, pages 13 - 97, Alphen aan den Rijn, The Netherlands, 1977. Sijthoff & Noordhoff International Publishers.
249
BIBLIOGRAPHY
250
[lo] Alan F. Beardon. The Geometry of Discrete Groups. Number 91 in Graduate Texts in Mathematics. Springer-Verlag, Berlin-HeidelbergNew York, 1983.
[ll] Lipman Bers. Spaces of degenerating Riemann surfaces. In Leon Greenberg, editor, Discontinous Groups and Riemann Surfaces, P m . 1973 Conf. Univ. Maryland, number 79 in Ann. Math. Stud., pages 43 - 55, Princeton, NJ, 1974. Princeton University Press and University of Tokyo Press. [12] Lipman Bers. Finite dimensional TeichmulIer spaces and generalizations. Bull. Amer. Math. SOC.,5(2):131 - 172, September 1981. [13] Lipman Bers. An Inequality for Riemann Surfaces. In Isaac Chavel and Hersel M. Farkas, editors, Differential Geometry and Complex Analysis, pages 87 - 93. Springer-Verlag, Berlin-Heidelberg-New York, 1985.
[ 141 N. Bourbaki.
Vurie'te's difle'rentielles et analytiques. Elements de mathCmatique XXXIII. Hermann, 1967.
[15] Robert Brooks. Constructing isospectral manifolds. Am. Math. Mon., 95(9):823 - 839, 1988.
[ l G ] G. W. Brumfiel. Quotient spaces for semialgebraic equivalence relations. Manuscript, to appear in Math. Z. [17] Emilio Bujalance, Josh J . Etayo, Josh M. Gamboa, and Grzegorz Gromadzki. Automorphism Groups of Compact Bordered Klein surfaces, A Combinatorial Approach. Number 1439 in Lecture Notes in Mathematics. Springer-Verlag, Berlin-Heidelberg-New York, 1990. [18] W. Burnside. On a Class of Automorphic Functions. Math. SOC.,XXIII:49 - 88, 1891.
P m . London
[19] P. Buser and K.-D. Semmler. The geometry and spectrum of the one holed torus. Comment. Math. Helv., 63(2):259 - 274, 1988. [20] Peter Buser. Sur le spectre de longueurs des surfaces de Riemann. C.R. Acud. Sci., Paris, Ser. I, 292:487 - 489, 1981. [21] Peter Buser. Isospectral Riemann surfaces. 36(2):167 - 192, 1986.
Ann. Inst. Fourier,
[22] Peter Buser. Geometry and Spectra of Compact Riemann Surfaces. Birkhauser Verlag, Basel-Boston-New York, 1991. To appear.
BIBLIOGRAPHY
25 1
[23] Peter Buser and Mika Seppala. Symmetric pants decompositions of Riemann surfaces, 1991. Preprint, to appear in Duke Math. J. [24] Henri Cartan. Expos6 12. Quotient d’un vari6t6 analytique par un groupe discret d’automorphismes. In Seminaire Henri Cartan 1953/1954. W. A. Benjamin, Inc., New York - Amsterdam, 1967. SQminaireE. N. S., 1953 - 1954. [25] H.-D. Coldeway. Kanonische polygone endlich erzeugter fuchsscher gruppen, 1971. Dissertation. [26] C. J. Earle. On moduli of closed Riemann surfaces with symmetries. In Advances in the Theory of Riemann Surfaces. Annals of Mathematics Studies 66, pages 119 - 130, Princeton, New Yersey, 1971. Princeton University Press and University of Tokyo Press. [27] C. J. Earle and A. Marden. Manuscript. [28] D. B. A. Epstein. Curves on 2-manifolds and isotopies. Acta Math., 115:83 - 107, 1966. [29] Hershel M. Farkas and Irwin Kra. Riemann Surfaces, volume 71 of Graduate Texts in Mathematics. Springer-Verlag, Berlin-HeidelbergNew York, 1980. [30] A Fathi and F. Laudenbach, editors. Travaux de Thurston sur les surfaces, volume 66 - 67 of Aste‘risque. SOC. Math. France, Paris, 1979. [31] R. Fricke and F. Klein. Vorlesungen iiber die Theorie der automorphen Funktionen. Druck und Verlag von B. G. Teubner, Leipzig, 1897,1926. [32] Frederick P. Gardiner. Teichmiiller T h e o y and Quadratic Diflerentials. A Wiley-Interscience of Series of Texts, Monographs, and Tracts. John Wiley & Sons, New York Chichester Brisbane Toronto Singapore, 1987. [33] F. W. Gehring and 0. Lehto. On the total differentiability of functions of a complex variable. Ann. Acad. Sci. Fenn. A I, 272, 1959. [34] Samuel I. Goldberg. Curvature and Homology. Dover Publications, Inc., New York, 1962. [35] P. Gordan. Uber endliche Gruppen linearer Transformationen einer Veranderlichen. Math. Ann., 12:23 - 46, 1877.
252
BIBLIOGRAPHY
[36] Noami Halpern. Some contributions t o the theory of Riemann surfaces, 1978. Thesis, Columbia University. [37] Joe Harris. An introduction to the moduli space of curves. In Mathematical aspects of string theory, number 1 in Adv. Ser. Math. Phys., pages 285 - 312,1987. Proc. Conf., San Diego Calif. 1986. [38] Joe Harris and David Mumford. On the Kodaira Dimension of the Moduli Space of Curves. Invent. math, 67:23 - 86, 1982. [39] Heinz Helling. Diskrete untergruppen von SL2(R). Inventiones math., (17):217-229,1972. [40] Heinz Helling. Uber den Raum der kompakten Riemannschen flachen vom Geschlecht 2. J. reine angew. Math., 268/269:286 - 293, 1974. [41] Frank Herrlich. The extended Teichmiiller space, 1991. Math. Z. (to appear) (Math. Inst., Ruhr-Univ., D-4630 Bochum). [42] Adolf Hurwitz. ober Riemann'sche Flachen mit gegebenen Verzweigungspunkten. Math. Ann., 39:l - 61, 1891. Reprinted in Adolf Hurwitz: Mathematische Werke, Band I, Funktionentheorie, Birkhauser, 1932, 321 - 381. [43] Adolf Hurwitz. Algebraische Gebilde mit eindeutigen Transformationen in sich. Math. Ann., 41:403 - 442, 1893. Reprinted in Adolf Hurwitz: Mathematische Werke, Band I, Funktionentheorie, Birkhauser, 1932,391 - 430. [44] Linda Keen. Collars on Ricmann surfaces. In Discontinuous Groups and Riemann Surfaces, volume 79 of Ann. of Math. Studies, pages 263 - 268. Princeton University Press, 1974. [45] Felix Klein. Uber eine Art von Riemannschen Flachen. Math. Annalen, 10, 1876. [46] Felix Klein. h e r eine neue Art von Riemannschen Flachen. Math. Annalen, 10, 1876. [47] Felix Klein. i%er Riemanns Theorie der algebmischen Funktionen und ihrer Integrale. - Eine Erg6nzung der gew6hnlichen Darstellungen. B. G. Teubner, Leipzig, 1882. [48] Felix Klein. Uber Realititsverhaltnisse bei der einem beliebigen Geschlechte zugehorigen Normalkurve der cp. Math. Annalen, 42,1892.
BIB LlOG RAP11Y
253
[49] Felix Klein. Uber Realititsverhaltnisse bei der einem beliebigen Geschlechte zugehorigen Normalkurve der 9.Math. Annalen, 42,1892.
[50] Finn Knudsen and David Mumford. The projectivity of the moduli space of stable curves. I: Preliminaries on “det” and “Div”. Math. Scand., 39:19 - 55, 1976. [51] Finn F. Knudsen. The projectivity of the moduli space of stable curves. 11: The stacks M sub(g, n). Math. Scand., 52:161 - 199, 1983. [52] Finn F. Knudsen. The projectivity of the moduli space of stable curves. 111: The line bundles on M s u b ( g , n ) , and a proof of the projectivity of M - sub(g,n) in characteristic 0. Math. Scand., 52:200 212, 1983. [53] Irwin Kra. On Lifting of Kleinian Groups to SL(2, C). In Isaac Chavel and Hersel M. Farkas, editors, Diflerential Geometry and Complex Analysis, pages 181 - 193. Springer-Verlag, 1985. [54] S. Kravetz. On the geometry of Teichmuller spaces and the structure of their modular groups. Ann. h a d . Sci. Fenn., 278:l-35,1959. [55] Ravi S. Kulkarni. Some investigations on symmetries of Riemann surfaces. Institut Mittag-LeDer Report, (S), 1989/90. [56] A. G . Kurosh. The Theory of Groups, 1-2. Chelsea Publishing Company, New York, 1955-1956.
[57] Joseph Lehner. Discontinuous Groups and Automorphic Functions. Mathematical Surveys. American Mathematical Society, Providence, Rhode Island, 1964. [58] 0. Lehto. Quasiconformal homeomorphisms and Beltrami equations. In W. J. Harvey, editor, Discrete Groups and Automorphic Functions, pages 121 - 142. Academic Press, 1977. [59] 0. Lehto and I<. I. Virtanen. Quasiconformal mappings in the plane, volume 126 of Die Grundlehren der mathematischen Wissenschaften. Springer-Verlag, Berlin-Heidelberg-New York, 1973. Translated from the German by I<. W. Lucas. 2nd ed. [60] OK Lehto. Univalent Functions and Teichmtiller Spaces, volume 109 of Graduate Texts in Mathematics. Springer-Verlag, BerlinHeidelberg-New York, 1986.
254
BIBLIOGRAPHY
[61] W. Magnus, A. Karras, and D. Solitar. Combinatorial group theory: presentations of groups in terms of generntors and relations. Interscience, 1966. [62] H. P. McKean. Selberg’s trace formula as applied to a compact Riemann surface. Commun. pure appl. Math., 25~225- 246, 1972. [63] H. P. McKean. Correction to: Selberg’s trace formula as applied to a compact Riemann surface. Commun. pure appl. Math., 27:134, 1974. [64] J. Morgan and P. Shalen. Valuations, trees, and degenerations of hyperbolic structures. I. Ann. of Math, pages 401-476, 1984. [65] D. Mumford. The structure of the moduli spaces of curves and abelian varieties. In Proc. Internat. Congr. Math., pages 457 - 467, 1970. [66] D. Mumford and J. Fogarty. Geometric invariant theory, volume 34 of Ergebnisse der Mathematik. Springer-Verlag, Berlin-Heidelberg-New York, 1982. [67] David Mumford. Curves and Their Jacobians. University of Michigan Press, Ann Arbor, Michigan, second printing 1976 edition, 1975. [68] David Mumford. Stability of projective varieties. L’Ens. Math., 23:39 - 110, 1977. [69] Subhashis Nag. The complex analytic theory of Teichmueller spaces. Canadian Mathematical Society Series of Monographs and Advanced Texts. John Wiley, New York etc., 1988. [70] S. M. Natanzon. Moduli spaces of real curves. Tmns. Mosc. Math. SOC.,1 ~ 2 3 3- 272, 1980. [71] H. L. Royden. Automorphisms and isometries of Teichmiiller space. In Cabiria Andreian Cazacu, editor, Proceedings of the RomanianFinnish Seminar on Teichmdler Spaces and Quasiconformal Mappings, Bmsov 1969, pages 273 - 286. Publishing House of the Academy of the Socialist Republic of Romania, 1971. [72] H.L. Royden. Automorphisms and isometries of Teichmiiller space. In Lars V. Ahlfors et al., editor, Advances in the Theory of Riemann Surfaces, volume 66 of Ann. of Math. Studies, pages 369-383. 1971. [73] Niels Schwartz. Compactification of varieties. Arkiv fo’r maternatik, 28(2):333 - 370, 1990.
BIBLZOGRAPfZY
255
[74] Mika Seppda. Teichmiiller Spaces of Klein Surfaces. Ann. Acad. Sci. Fenn. Ser. A I Mathematica Dissertationes, 15:l - 37, 1978. [75] Mika Seppala. Quotients of complex manifolds and moduli spaces of Klein surfaces. Ann. Acad. Sci. Fenn. Ser. A . I. Math., 6:113 - 124, 1981. [76] Mika Seppala. On moduli of real curves. In Jean-Jacques Risler, editor, Seminaire sur la Geometrie Algebrique Reefle, pages 85 - 95, Paris VII, 1986. Publications Mathhmatiques de l'Universit6 Paris VII. [77] Mika Seppala. Moduli spaces of stable real algebraic curves. Znstitut Mittag-Lefler Report, 12:l - 28, 1989/90. To appear in: Ann. scient. Ec. Norm. Sup. 4" sCrie. [78] Mika Seppala. Real algebraic curves in the moduli space of of complex curves. Compositio Mathemuticu, 74:259 - 283, 1990. [79] Mika Seppala and Robert Silhol. Moduli spaces for real algebraic curves and real abelian varieties. Math. Z., 201:151 - 165, 1989. [80] Mika Seppala and Tuomas Sorvali. Parametrization of Teichmiiller spaces by geodesic length functions. In D. Drasin, C. J. Earl, F. W. Gehring, I. Kra, and A. Marden, editors, Holomorphic Functions and Moduli II, volume 11 of Publicutions of the Mathematical Sciences Research Institute Berkeley, pages 267 - 283. Springer-Verlag, New York Berlin Heidelberg London Paris Tokyo, 1988.
[81] Mika Seppala and Tuomas Sorvali. Horocycles on Riemann surfaces, May 1991. Preprint, t o appear in Proc. Amer. Math. SOC.
[82] Mika Seppala and Tuomas Sorvali. Traces of commutators of Mobius transformations, 1991. To appear in Math. Scand. [83] J. P. Serre. Cohoniologie des groupes discrets. In Prospects of mathematics, volume 70, pages 77 - 169. 1971. [84] G. Shimura. On the fields of rationality for an abelian variety. Nagoya Math. J., 45~167- 178, 1972. [85] C. L. Siegel. Beinerkung zu einem Satz von Jakob Nielsen. In K. Chandrasekharan und H. Maai3, editor, Carl Ludwig Siegel Gesammelte Abhandlungen, Band III, pages 92 - 96. Springer-Verlag, Berlin Heidelberg New York, 1966.
256
BIBLIOGRAPHY
[86] Carl L. Siegel. Topics in Complex Function Theory, volume 2 of Wiley-Interscience. John Wiley & Sons, Inc., New York - London - Sydney - Toronto, 1971. [87] Carl L. Siegel. Topics in Complex Function Theory, volume 1 of Wiley-Interscience. John Wiley & Sons, Inc., New York - London - Sydney - Toronto, 1971.
[88]Robert Silhol. Compactifications of Moduli Spaces in Real Algebraic Geometry, 1990. Preprint, to appear in Inv.'Math. [89] Tuomas Sorvali. The boundary mapping induced by' an isomorphism of covering groups. Ann. Acad. Sci. Fenn., 526:l - 31, 1972. [go] Tuonias Sorvali. On discontinuity of Moebius groups without elliptic elements. Publ. Univ. Joensuu, Ser. B 9, pages 1 - 4, 1974. [91] Edwin H. Spanier. Algebraic Topology. McGraw-Hill Book Company, New York, 19GG. [92] Kurt Strebel. On the maximal dilatation of quasiconformal mappings. Proc. Amer. Math. Soc., 6:903 - 909, 1955. [93] Oswald Teichmuller. Extremale quasikonforme Abbildungen und quadratische Differentiale. In Lars V. Ahlfors and Frederick W. Gehring, editors, Oswald Teichmtiller Gesammelte Abhandlungen Collected Papers, pages 335 - 531. Springer-Verlag, Berlin-HeidelbergNew York, 1982. Originally appeared in Abh. Preui3. Akad. Wiss., math.-naturw. K1. 22, 197( 1939). [94] Oswald Teichmuller. Veranderliche Riemannsche Flachen. In Lars V. Ahlfors and Frederick W. Gehring, editors, Oswald Teichmtiller Gesammelte Abhandlungen Collected Papers, pages 712 727. Springer-Verlag, Berlin-Heidelberg-New York, 1982. Originally appeared in Deutsche Math. 7, 344 - 359 (1944). [95] Marie-France Vigneras. Varietes riemanniennes isospectrales et non isometriques. Ann. Math., (112):21 - 32, 1980. [9G] Guido Weichhold. Uber syinmetrische Riemannsche Flachen und die Periodizitatsmodulen der zugehorigen Abelschen Normalintergale erstes Gattung. Leipziger Dissertation, 1883. [97] A. Weil. On discrete subgroups of Lie groups 1. Ann. Math., 72:369 384,1960.
BIBLIOGRAPHY
257
[98] A. Weil. On discrete subgroups of Lie groups 11. Ann. Math., 75:578 - 602, 1962.
[99] A. Wiman. Uber die algebraischen Kurven von den Geschlechten p = 4 , 5 und 6, welche eindeutige Transformationen in sich besitzen. Bihang Till Kongl. Svenska Ventenskaps-Akaderniens Handlingar, 21(3):1 - 41, 1895.
[loo] A. Wiman. Uber die hyperelliptischen Kurven und diejenigen vom Geschlecht p = 3 , welche eindeutige Transformationen in sich zulassen. Bihang Till Kongl. Svenska Ventenskaps-Akademiens Handlingar, 21( 1):l - 23, 1895.
[loll Scott A. Wolpert. The geometry of the moduli space of Riemann surfaces. Bull. Am. Math. SOC.,New Ser., 11:189 - 191, 1984. [lo21 Li Zhong. Nonuniqueness of Geodesics in Infinite Dimensional Teichmuller spaces. Research Report, (29):l - 25, 1990.
Subject Index Mg M ( C ) moduli space, 146 Home%( P'), 139 d, 141 d, 141 M ( P 2 ) ,137 Ro(G, PGL(2, R) deformation space of groups, 153 Aut( F) continuous automorphisms of a topological group, 165 Auto( F) inner automorphisms of a topological group, 165 Diff+(C), 145 Homeo(P2), 139 M(C) moduli space, 146
BeZ(G) Beltranii differentials of G, 143 Bel(X) Beltraini differentials of X ,142
D(-~J)(G) differentials of a group, 143 D(-1*1)(X) ( - 1 , l ) differentials of X , 142 L-invariant, 51 L(G) of limit points of G is the limit set limit set, 107 M ( P 2 ) ,140 P2 pair of pants, 137
T(C) Teiclimuller space, 145
Tg T ( C )
M(C)
Teichiniiller space, 145
complex structures, 145
r(C) inodular group, 146
r g
Diff(C), 145
rp)
modular group, mapping class group, 146
Abelian differential periods, 147 absolutely continuous, 63 ACL (absolutely continuous), 63 Ahlfors, L. V., 59, 65, 140, 147, 192 algebraic curves complex, 185 real, 185 Alling, N., 184 Andreotti, A., 207 annulus
C" complex double, 149
f , elliptic, 24
H,handle, 24 boundary, 27 interior, 28 real handle, 28 P, pants, 24 boundary, 26 interior, 26 258
SUBJECT INDEX Teichmuller space of, 152 atlas, 70 complex analytic, 70 dianalytic, 70 orientable, 70 automorphisms of C action on the space of compl. structures, 145 Baily, W. L., 205 base point of a pants decomposition, 188 Beltrami differential on a Klein surface, 142 Beltrami equation, 64 Bers, L., 65, 192, 206 biholomorphic mapping, 66 boundary, 70 branch number, 97 branch point, 97 branching number, total, 98 Brumfiel, G., 164 Bujalance, E., 100 Buser, P., 115, 117 Cartan, H., 205 Chen Min, 12 circular distortion, 62 collar, 110 p-collar, 110 area, 110 boundary inner boundary component, 113 outer boundary component, 113 width, 110 Collar Lemma, 115 commutator, 29 matrix of, 131 complex dilatation, 64 complex double, 149
259 coordinate, 23 coordinate chart, 69 coordinate transition function, 70 covering orientable, 77 cross cap, 80 curve, 72 closed, 76 end-points, 72 one-sided, 76 simple closed, 76 two-sided, 76 curves homotopic, 86 decomposing curve of a pants decomposition of a stable surface, 187 decomposing curves, 119 decomposing node of a pants decomposition of a stable surface, 187 decomposition into pairs of pants of a stable surface, 187 deformation space of a group in a topol. group, 164 of groups, 153 Dehn twist left Dehn twist, 95 derivates L P , 64 differential (-1,l) on a Klein surface, 142 Beltrami, 64 dilatation complex, 64 complex, transformation, 65 maximal, 61 dilatation quotient, 63 direct sum, 80
260 Dirichlet polygon (of a Fuchsian group), 85 discontinuous, 82 discrete (group), 82 disk on a Riemann surface, 110 distortion circular, 62 double complex, 77 doubly connected surfaces moduli, 137 dual (of a Banach space, 66 Earle, C., 148, 207 elliptic modular function, 181 elliptic modular group, 181 Epstein, D. B. A., 123 Etayo, J. J., 100 Euler characteristic, 76 Existence Theorem (of quasiconformal mappings), 65 Extremal Mapping Theorem, 140, 144 Fenchel-Nielsen coordinate, 190 gluing angle, 190 length coordinate, 190 modified, 191 Fricke, L., 3 Fuchsian group Dirichlet polygon, 85 fundamental domain, 85 of the first kind, 107 of the second kind, 107 PoincarC polygon, 85 fundamental domain (of a Fuchsian group), 85 fundamental group, 87 Gamboa, J. M., 100 Gardiner, F. P., 148, 164,204 GauD-Bonnet formula, 96 genus, 43, 76, 77
SUBJECT INDEX arithmetic, 77 of a surface with nodes, 185 geodesic curves distance between, 111 geodesic length function, 158 parametrization of the Teichmiiller space by, 161 continuity, 159 real analyticity, 160 Geometric Invariant Theory, 205 Gieseker, D., 205 glidereflection, 16 gluing angle, 190 Gordan, P., 100 Gromadzki, G., 100 group Beltrami differential, 143 compact type, 43 differential, 143 discontinuous, 82 discrete, 82 Kleinian, 82 Harris, J., 206 Helling, H., 164,170,171,174,175, 245 Herrlich, F., 206 Holm, P., 207 holomorphic function between Banach spaces, 66 homeomorphism analytic, 70 dianalytic, 70 holomorphic, 70 homotopy classes, 87 homotopy group, 87 horocycle, 103 Hurwitz Theorem, 97,99 Hurwitz, A., 97-99 hyperbolic angle, 211 hyperbolic area, 96 hyperbolic circle
SUBJECT INDEX length, 212 hyperbolic disk area, 212 hyperbolic metric, 33 curvature, 210 definition, 210 distance between points, 210 intrinsic, 96 isometries, 21 1 Riemann surfaces, 96 hyperbolic ray, 211 hyperelliptic Riemann surface, 162 index of orientability, 78 involution, 77 isometric circle, 25 isometric Riemann surfaces, 117 isomorphism geometric, 23, 153 induced, 20 type-preserving, 20 isospectric Riemann surfaces, 117 Keen, L., 115 Klein bottle, 72 Teichmiiller space of, 152 Klein surface classical, 71 non-classical, 71 Klein’s quartic, 100 Klein’s Riemann surface of genus 3,100 Klein, F., 3, 5, 208 Kleinian group, 82 Knudsen, F., 205 Kra, I., 132, 135 Kravetz, S., 164 Kulkarni, R., 100 Lehner, J., 3 Lehto, O., 59, 140, 204 Lehtonen, A., 72, 73, 81 length coordinate, 190
26 1 limit set of a Fuchsian group, 107 mapping biholomorphic, 66 quasiconformal, 61 mapping class group discreteness of the action, 163 of a surface, 146 maximal dilatation, 61 McKean, H. P., 117 metric of a stable surface, 186 modular group elliptic, 181 modular function, elliptic, 181 modular group discrete orbits, 163 discreteness of the action, 163 of a surface, 146 moduli problem, 71, 137 moduli space of symmetric stable Riemann surfaces topology, 197 of real curves, 195 of stable Riemann surfaces topology, 193 of the torus compactification, 183 isomorphic to C, 182 algebraic structure, 205 complex structure, 205 of a surface, 146 of pairs of pants, 140 of stable Riemann surfaces, 189 projectivity, 205 Morgan, J., 164 Mumford, D., 205 Mobius strip, 72 Teichmiiller space of, 152 Mobius transformation covering a homotopy class, 88
262
SUBJECT INDEX parabolic horocycle, 103 conjugate, 14 elliptic, 14 glide-reflection, 16 hyperbolic, 13 L-invariant, 51 attracting fixed point, 13 axis, 13 multiplier, 13 repelling fixed point, 13 loxodromic, 17 orientation preserving, 12 orientation reversing, 12 parabolic, 14 reflection, 16 type, 12
Nag, S., 204 Natanzon, S., 208 neighborhood €-distance, 109 Nielsen Criterium, 6 Nielsen’s Theorem, 153 Nielsen, J., 6, 106, 153 node, 185 non-Euclidean line, 12 oriented, 48 normalizer, 198 orientation, 70 orthogonal decomposition, 46 pair of pants general, 117 standard, 117 pairs of pants degenerate, 187 pants decomposition, 118 geodesic, 188 parametrization problem, 23 part of a nodal surface, 185
Picard group, 83 Poincar6 polygon (of a Fuchsian group), 85 principal-circle group, 23 primary element, 33 principal-circle pair, 24 properly discontinuous group, 82 pull back of a pants decomposition, 189 quadrilateral, 59 modulus, 60 quasiconformal mapping, 61 of a Klein surface, 141 quasiconformal mappings existence and uniqueness, 142 uniqueness, 65 ramification number, 97 real curve moduli space, 195 real projective plane, 71 reflection, 16 regular set, 82 Riemann mapping theorem, 86 Riemann moduli problem, 137 Riemann moduli space, 140 Riemann surface doubly connected moduli, 137 isometric, 117 isospectric, 117 non-classical moduli space, 195 Riemann, B., 98 Riemann-Hurwitz Relation, 98 ring domain, 60 moduli, 137 modulus, 60 ringed space, 148 Royden, H. L., 148,205 Schwartz, N., 164
SUBJECT INDEX self-mappings of C action on the space of compl. structures, 145 Semmler, K.-D., 117 SeppBa, M., 206-208 set compact type, 43 of discontinuity (of a group), 82 regular (of a group), 82 Shalen, P., 164 Siege], C. L., 106 Silhol, R., 206-208 solution LP, 64 sphere, 71 stabilizer, 82 stable Riemann surface, 186 stable surface, 186 metric, 186 strong deformation, 186 structure complex, 70 dianalytic, 70 surface hyperbolic area, 96 orientable, 70 symmetric, 79 with boundary, 69 without boundary, 70 surface with nodes, 185 genus, 185 Teichmuller metric, 146 Teichmuller space as a component of an affine variety, 164 as a ringed space, 148 automorphisms and isometric self-mappings, 148 complex structure of, 148 defined on Oct. 18, 1953, 140
263 holomorphic functions on, 148 of agroup, 154 of a Klein bottle, 152 of a Mobius strip, 152 of a surface, 145 of a torus, 152 of an annulus, 152 of Beltrami differentials, 147 origin, 147 of discrete group representations, 165 of genus 1 surfaces, 152 of group representations, 165 of hyperbolic metrics, 146 of non-classical surfaces, 149 of pairs of pants, 139 parametrization, 158 Teichinuller theorem, 144 Teichmiiller, O., 140 terminal stable surface, 186 torus, 71 normalized representation, 150 Teichmuller space of, 152 total (subset of a Banach space), 66 total branching number, 98 trace of a matrix, 245 trace function, 245 Tukia, P., 108 twist parameter, 5 1 variable local, 69 Virtanen, K. I., 59 Weil, A., 167, 174 Wiinan, A., 100 Wolpert, S., 206
This Page Intentionally Left Blank